Coordinate Rotation Dlgital Computer(CORDIC)算法
参考:Computer Arithmetic: Algorithm and Hardware Design
原理
角度模式
考虑平面直角坐标系下的旋转,如图:
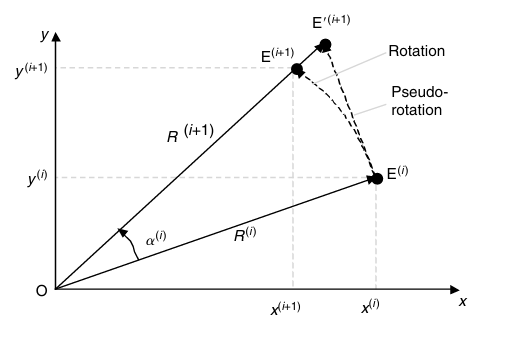
点$E^{(i)}$旋转$\alpha^{(i)}$后得到了点$E^{(i+1)}$
那么假设$E^{(i)}$的坐标为:$E^{(i)}$: $(x^{(i)},y^{(i)})=(R^{(i)}cos\theta,R^{(i)}cos\theta)$
$E^{(i+1)}$的坐标可以表示为:
$x^{(i)+1} = R^{(i)}cos(\theta+\alpha) = x^{(i)}cos\alpha - y^{(i)}sin\alpha \ =\frac{ x^{(i)}-y^{(i)}tan\alpha}{\frac{1}{cos\alpha}}\ = \frac{ x^{(i)}-y^{(i)}tan\alpha}{(1+tan^2\alpha)^{1/2}}$
同理有:
$y^{(i+1)} = R^{(i)}sin(\theta+\alpha) = x^{(i)}sin\alpha + y^{(i)}cos\alpha \ =\frac{ x^{(i)}tan\alpha + y^{(i)} }{\frac{1}{cos\alpha}}\ = \frac{ x^{(i)}tan\alpha + y^{(i)}}{(1+tan^2\alpha)^{1/2}}$
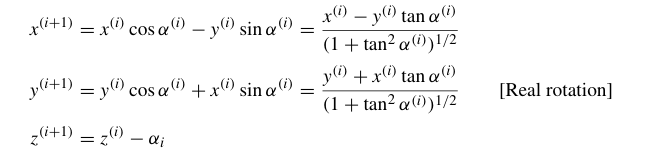
上述公式是一个迭代式,
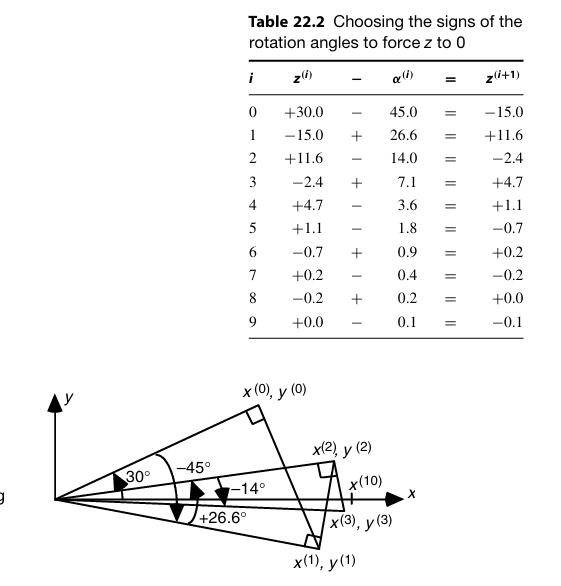
$ z^{(i)}$表示当前旋转之前向量与x轴的夹角,$ z^{(i+1)}$表示在旋转后与x轴的夹角(顺时针为正)。
现在考虑一种图中的一种伪旋转,对公式2边同时除以$\cos\alpha^{(i)}$,得到$E’^{(i)}$的坐标:
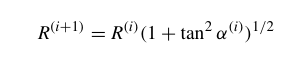
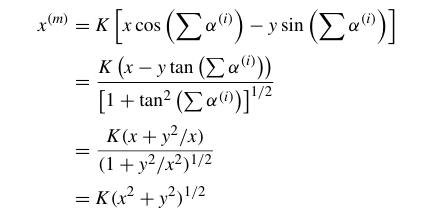
令$x^{(0)}=x, y^{(0)}=y, z^{(0)}=z$,则对于一个m次迭代的真旋转,有:
对伪旋转:
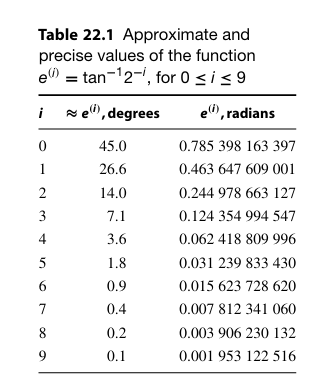
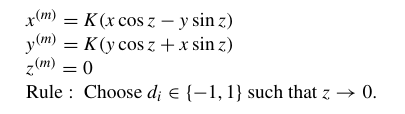
考虑每次迭代的角度选取,如果使$tan\alpha$恰好等于 $2^{-i},i=0,1,2,3…$则上式变为:
其中$d_i \in {−1,1}$
则每次真旋转迭代的计算可以通过:1次查表,2次移位,3次加(减)法实现。
对于伪旋转,由于每次的角度选取是固定值,因此K为常数,K = 1.646 760 258 121….
考虑计算 $cosz$,可以令$x^{(0)}=1, y^{(0)}=0, \sum\alpha^{(i)}=z$此时有:
如果计算$cos30^\circ$,可以:
由于表中的角度表示范围达到了$−99.7^\circ ≤ z ≤ 99.7^\circ$,因此可以通过上述方法加上基本三角变化求出任何角的正余弦值。
向量模式
通过令$y\rightarrow 0$,可以计算反三角函数值$tan^{-1}y$,此时,
带入
可得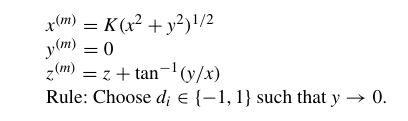
故可以取(1,y),将其旋转到x轴上,此时旋转过的角度即为$tan^{-1}y$
一个简单的python验证程序
1 | import numpy as np |
复杂度分析
对一个n位的cordic运算,若采用纯硬件实现,每一位需要1次查表,2次移位,3次加法,其计算复杂度是$O(n)$这个量级的。
考虑硬件实现,一个最简单的版本是这样的:
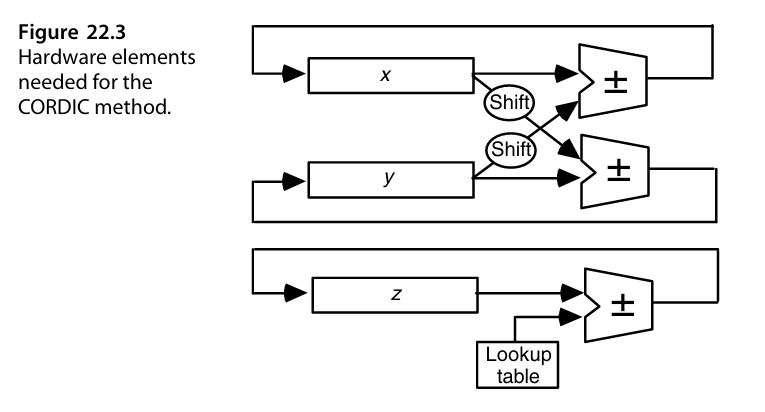
在不考虑优化版本时,图中的加法器可以用串行进位的方式实现,此时,对于k位的操作数,计算需要的时钟周期为$O(k^2)$。
通用版本
CORDIC算法可以被拓展,用于线性和双曲函数的计算。其通用公式为: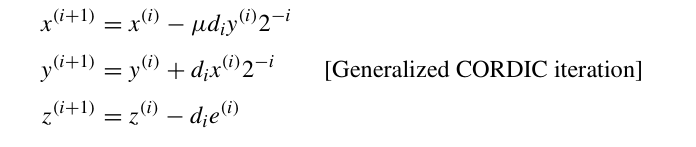

推理过程如下:
参考:(A unified algorithm for elementary functions)
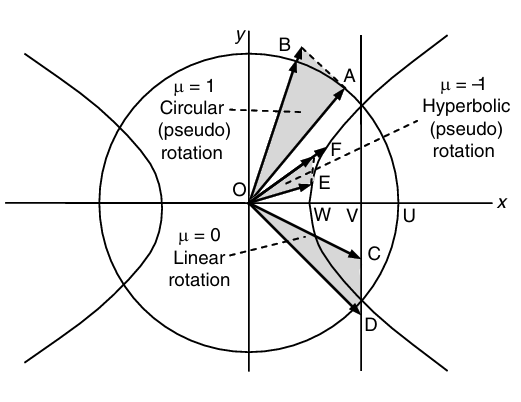
考虑一个从二维直角坐标系到极坐标的非线性映射:
其中R是映射后的向量长度,A是其与坐标轴的夹角。
显然当m取1时,该映射为从直角坐标系到极坐标系的坐标变换。
当m取0时, 该变换总是落在一条相同的直线上
当m=-1时,该变换为落在一条双曲线$x^2-y^2=1$上。
事实上,如果将R看作特定曲线与x轴交点到原点的距离,根据上述定义,总是有:
$A = \frac{2S}{R^2}$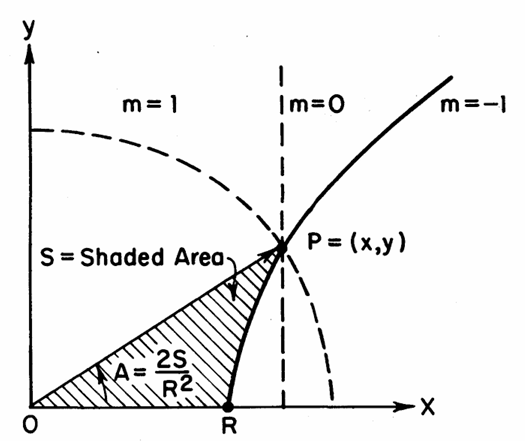
其中S为变换前的点P与点O,R围成的阴影部分面积。
如果给出一个迭代式:
其中$\delta_i$时任意值,而m是映射中的参数。那么每次迭代后的点经过非线性映射后,在极坐标下可以表示为: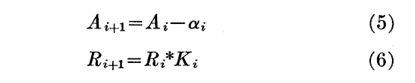
其中
即每次迭代可以看作是一次旋转和放缩。对n次迭代,最后得到的长度和角度为:
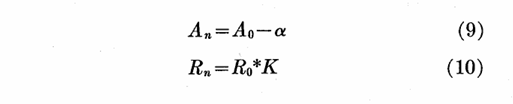
其中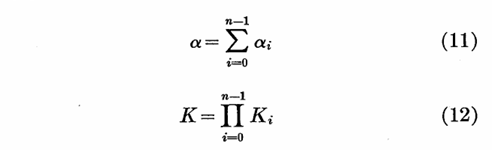
如果再定义一个新的变量
则经过n次迭代后的点经过逆映射后,可以得到其在直角坐标系下的坐标:
同样的,注意到当m=1时,该迭代式与之前推出的角度模式下的伪旋转迭代式一模一样。
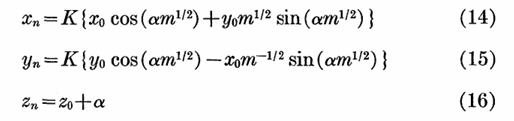
而当m=0时,分别让$y\rightarrow0$和$z\rightarrow 0$,可以得到如下不同的迭代结果:
且在m=0时,多轮迭代后的缩放因子为1.
上述公式说明,直线迭代可以用于计算乘法,除法或直接计算一个乘加、除加操作。
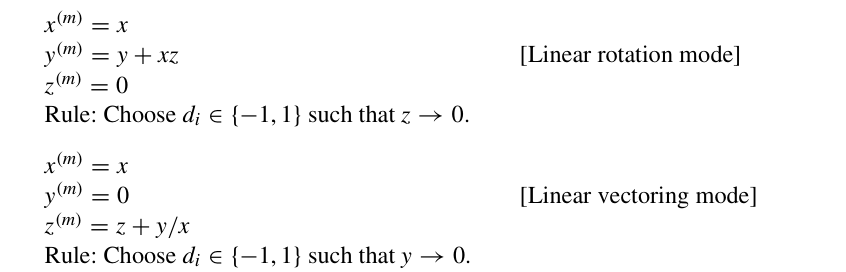
而对双曲映射,迭代结果分别为:
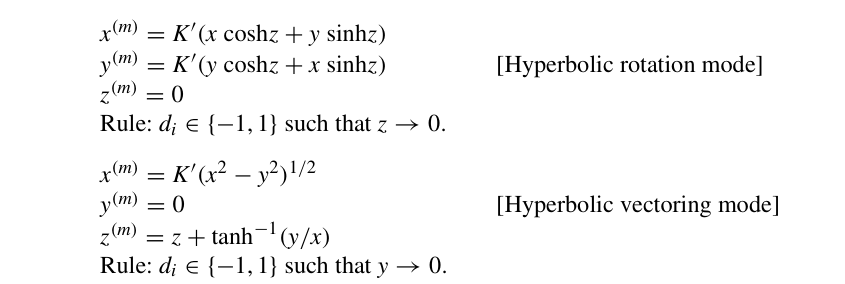
其中缩放因子K'=0.8281593609602。
上述公式说明,双曲映射可以被用来计算双曲正弦,双曲余弦和双曲正切函数。
另外需要注意的是,对于双曲映射,并不总是收敛的,这是因为对于tan函数,总是有:
$tan^{−1}(2^{−(i+1)}) ≥ 0.5tan^{−1}(2^{−i})$
而同样的关系:放在双曲正切中却并不总是成立。
$tanh^{−1}(2^{−(i+1)}) ≥ 0.5tanh^{−1}(2^{−i})$
一个简单的收敛方法为,当迭代次数为:$ i = 4, 13, 40, 121, …,3j + 1$时,该次迭代必须再重复一遍。即:
1,2,3,4,4,5,6,7,8,9,10,11,12,13,13,14….
(收敛性分析在原论文中有比较严格的推导,我懒得手推一遍,这里就不重复了,直接使用其结果)
计算范围为: With these provisions, convergence in computing hyperbolic sine and cosine functions is guaranteed for |z| < 1.13 and in the case of the tanh−1 function, for |y| < 0.81.
此外,以下函数也可以被间接计算出来:
收敛性仿真
写一个简单的双曲迭代来验证上述方法的收敛性:
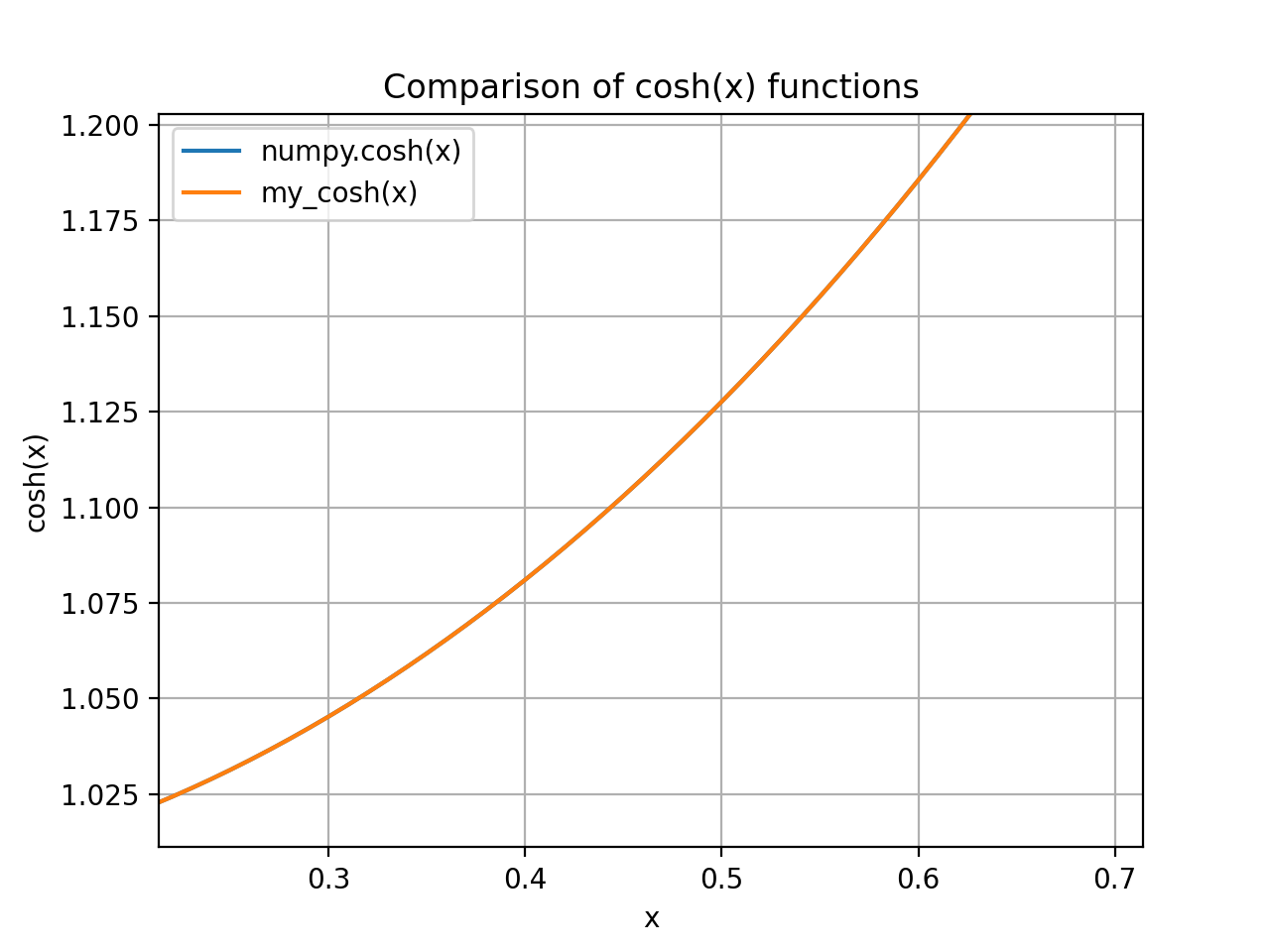
以cosh为例,以下是一段简单的python代码:
1 |
|
在不用重复第4次和第13次迭代时,结果如下:
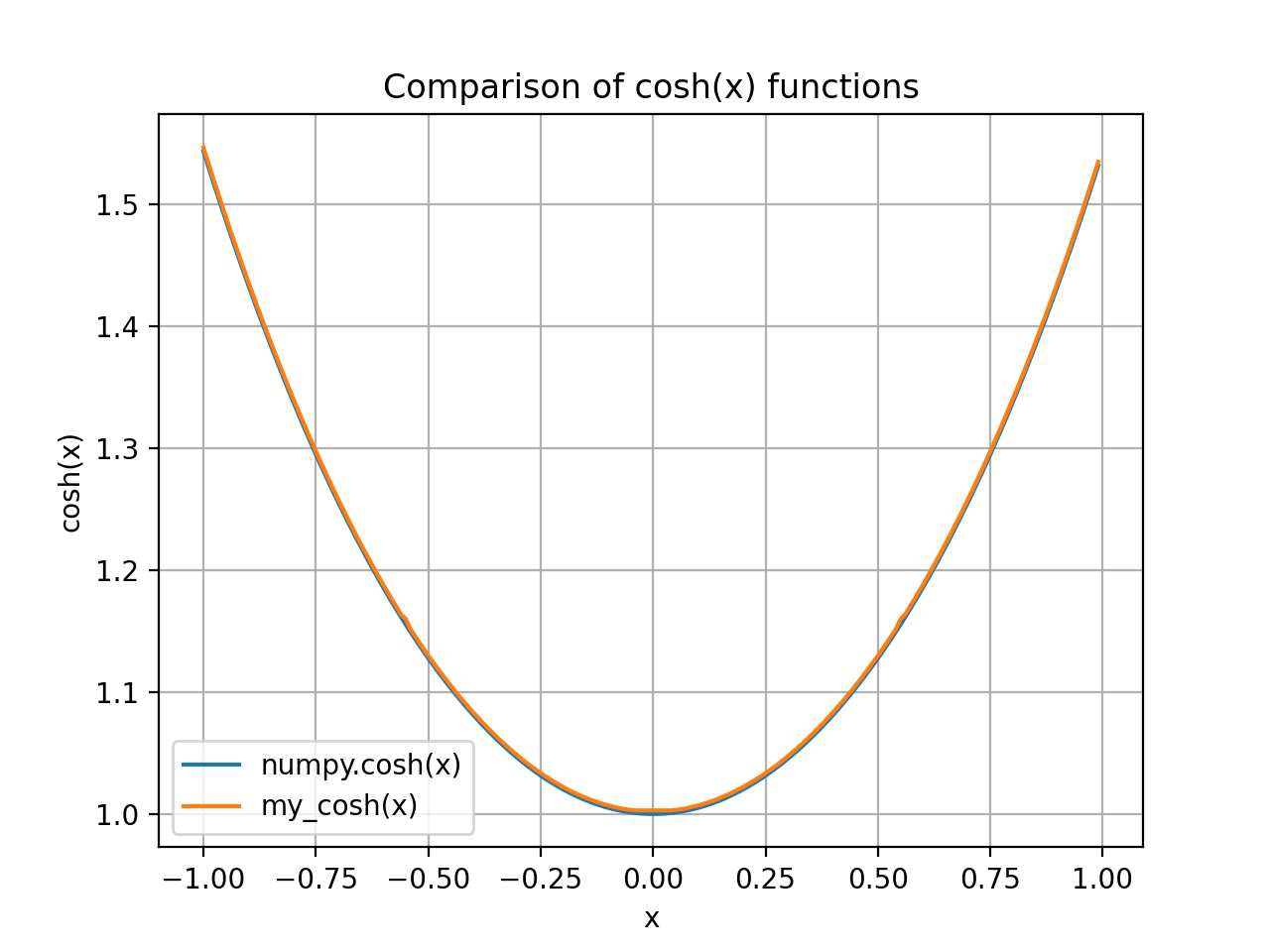
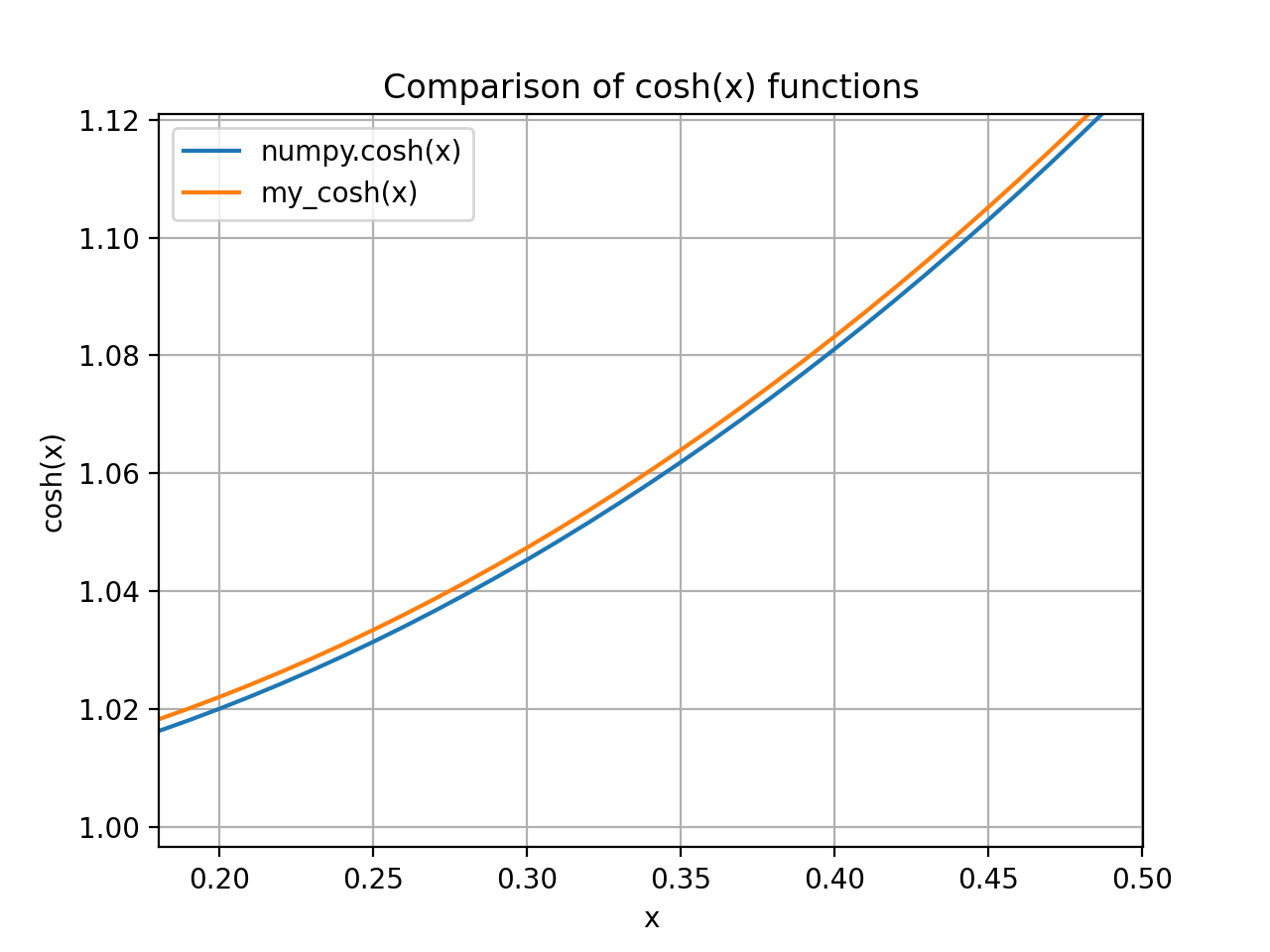
可以看到蓝色线和橙色线不完全重合,局部放大后结果如下:
取消对应注释,重复第4和第13次迭代,结果如下:
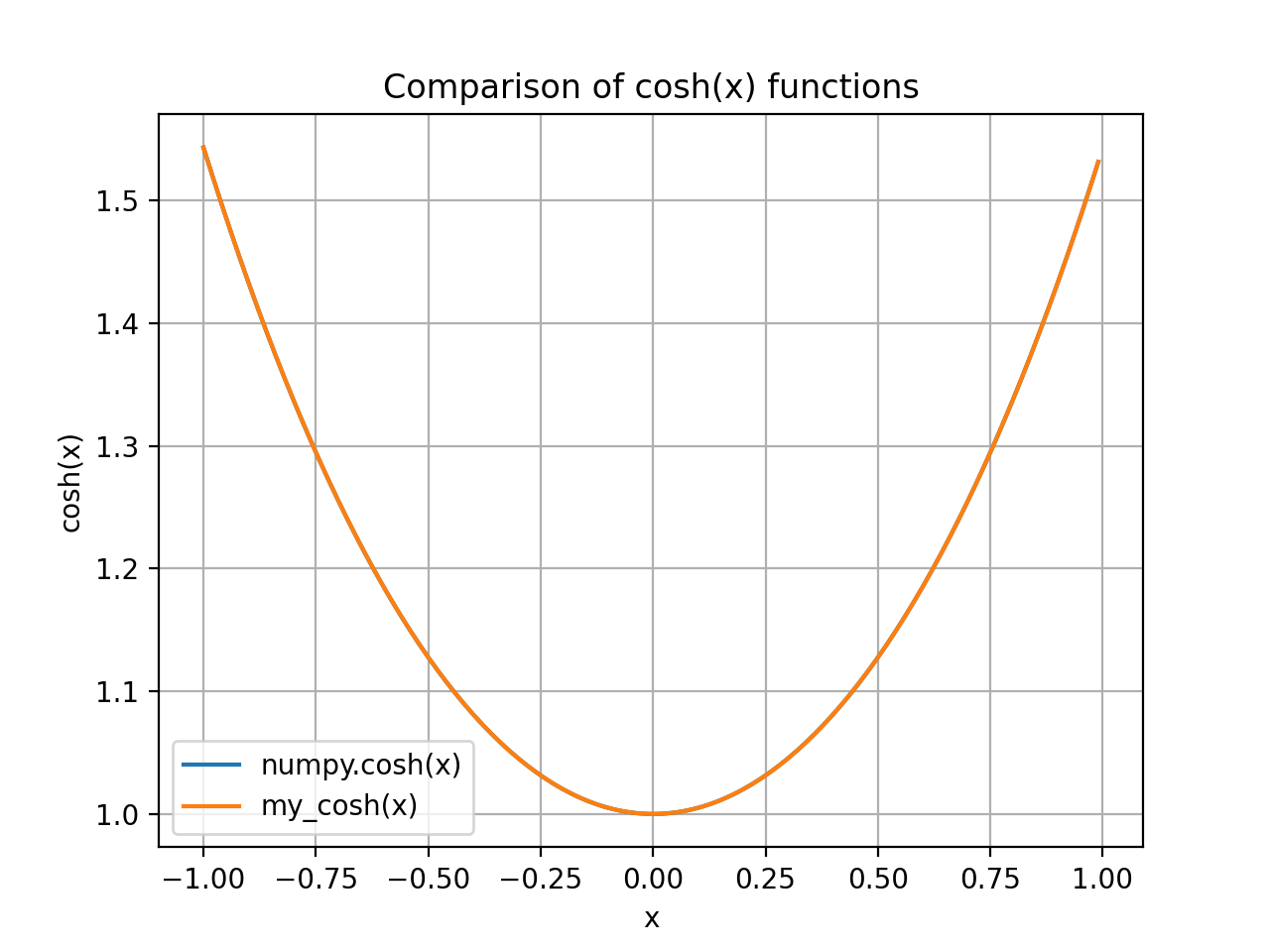
可以看到蓝色线和橙色线基本完全重合,局部放大后结果如下: