高等数字集成电路设计
Lecture1 introduction
本节主要对IC产业的发展进行概述,以及介绍一些数字IC设计中的常用概念和基本指标。
IC产业概述
集成电路行业是典型的高附加值行业,具有重资产,高技术附加值,和劳动力密集三重特点。其发展存在典型的周期性: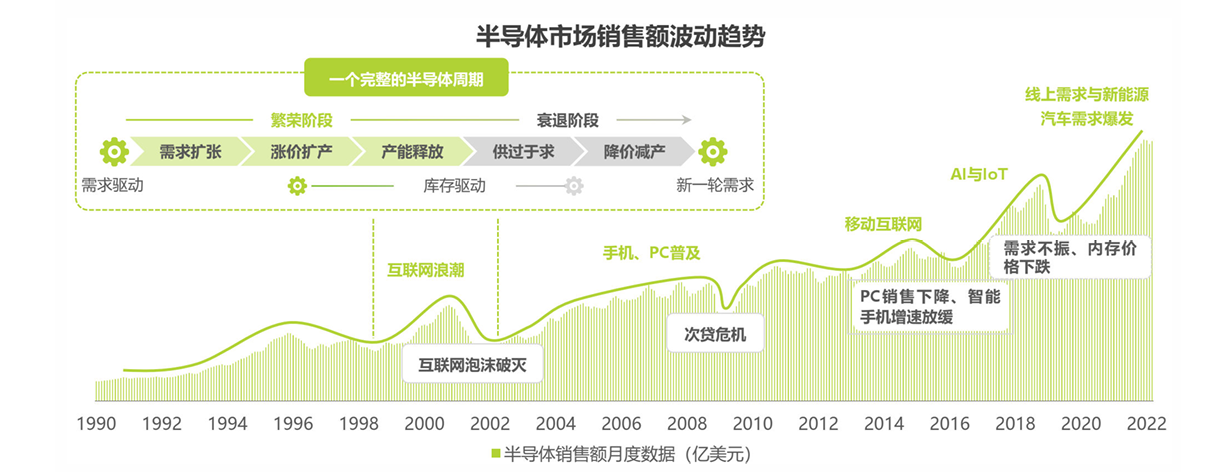
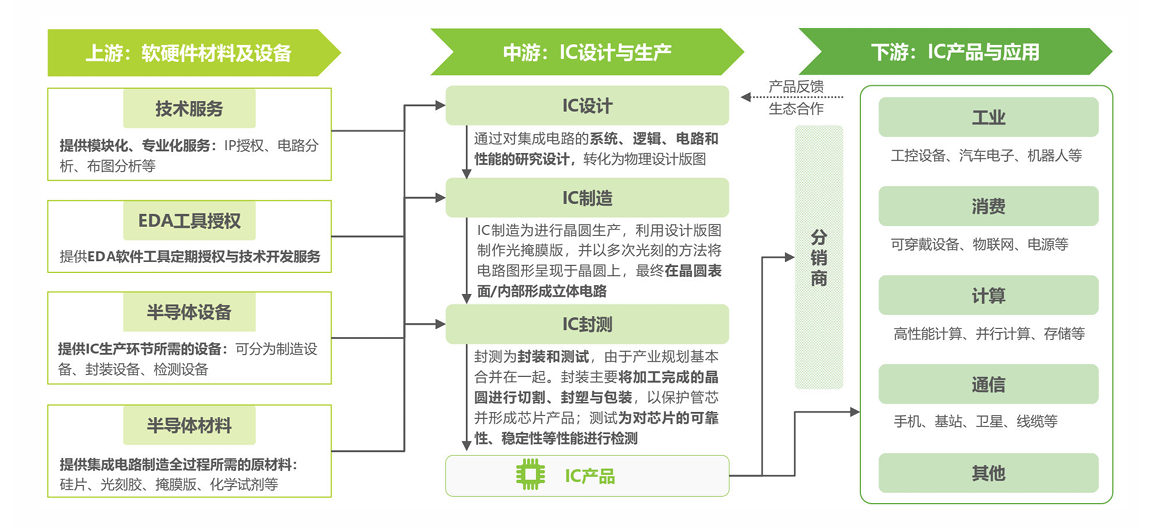
半导体行业的细分领域如下:
对应中国的产业图谱为: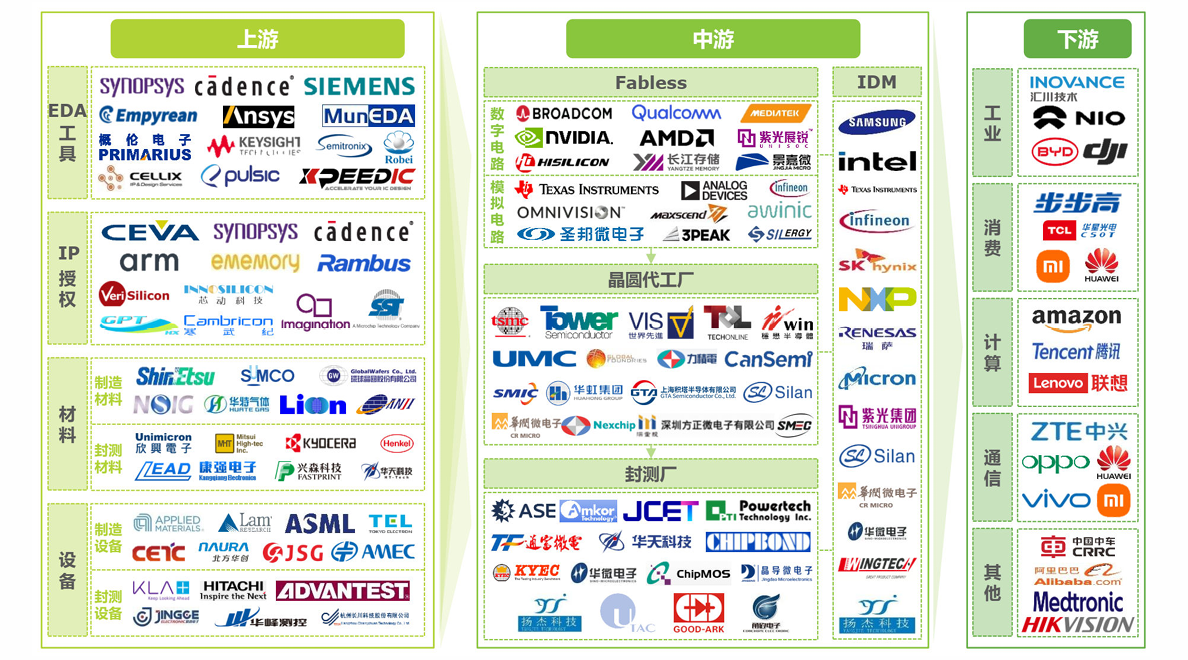
在IC产业的发展历程中,摩尔定律起到核心的推动作用。从芯片制造的角度讲,晶体管尺寸的scaling down能够带来性能,成本和各方面的益处,如下图: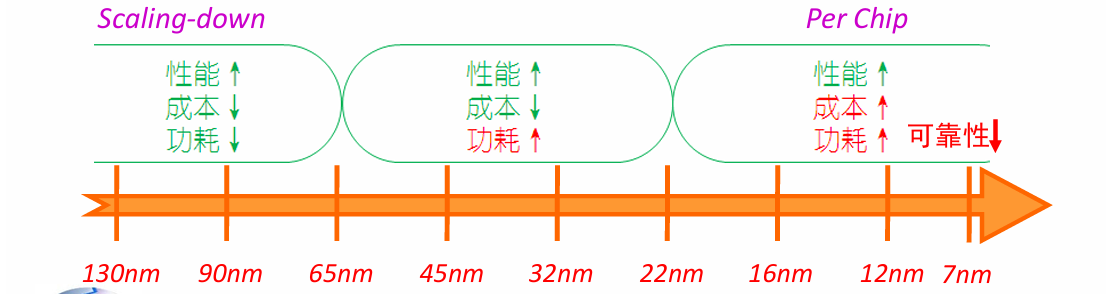
然而随着器件尺寸逼近物理极限,IC工业面临的功耗墙,成本(主要是验证方面成本的急剧提高)及可靠性等各方面的挑战。
各工艺节点下的芯片制作成本如下: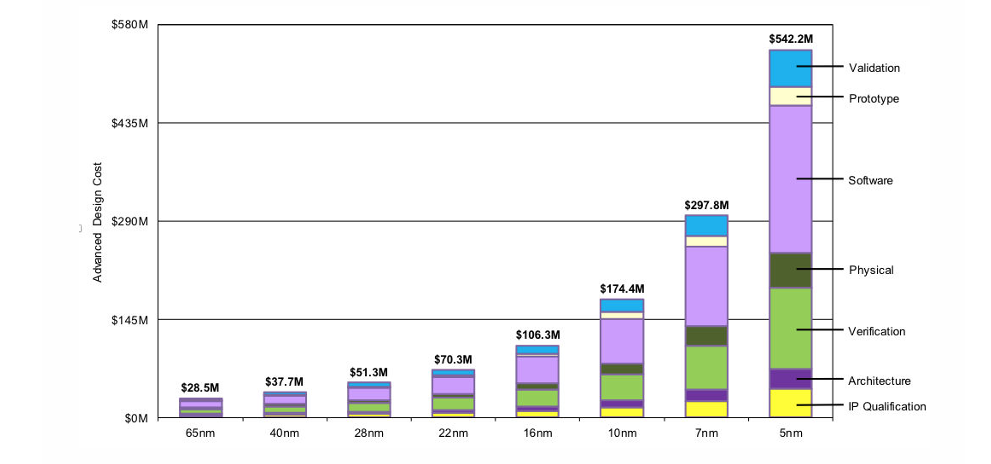
数字IC设计概览
方法学
数字IC设计从业者分为不同层级:架构,逻辑,电路和物理层级,它们负责不同抽象层级的设计,使用不同的设计工具,如下图: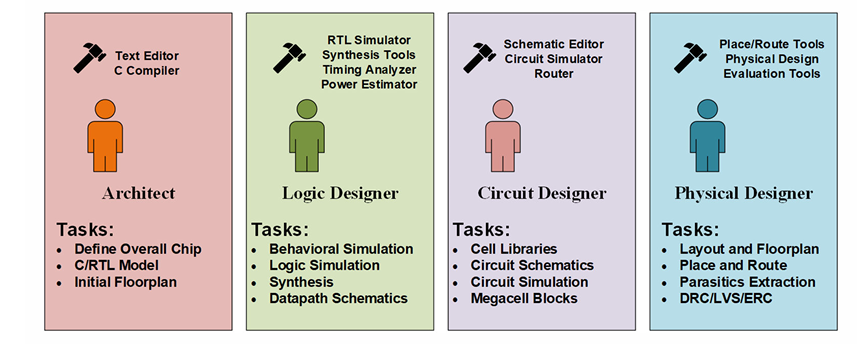
在数字IC的实际实现过程中,又分为全定制设计和半定制设计。其中半定制设计包括标准单元库(standard cell 设计方法)、门阵列(gate array设计方法)。而全定制设计则在器件层面进行性能和功能的优化。半定制的方法在一定程度上降低了设计难度和优化难度,但可能在性能上略逊于全定制设计。如今的大部分IC设计都是基于半定制设计的。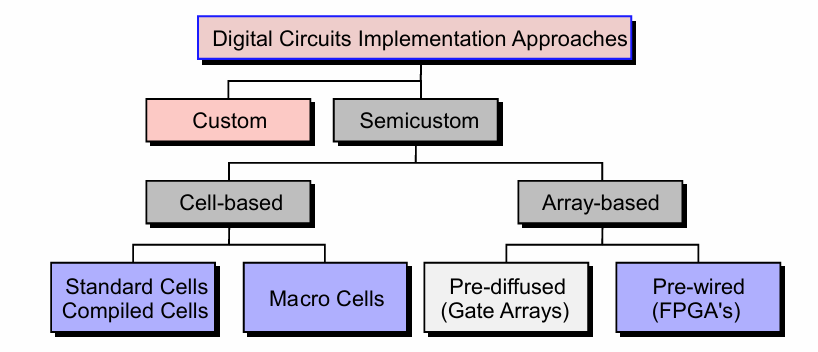
封装
生产出的芯片裸片并不能直接用于生产生活中的直接应用,而需要先进行封装,对芯片进行一定的物理保护,从而增加芯片的可靠性。芯片封装需要考虑以下几个因素:
- 电气特性,引入尽量小的寄生效应
- 机械特性:尽量高的稳定性和可靠性
- 热特性:高效的散热能力
- 经济性:尽量低的成本
下图展示了封装过程中引入的寄生参数: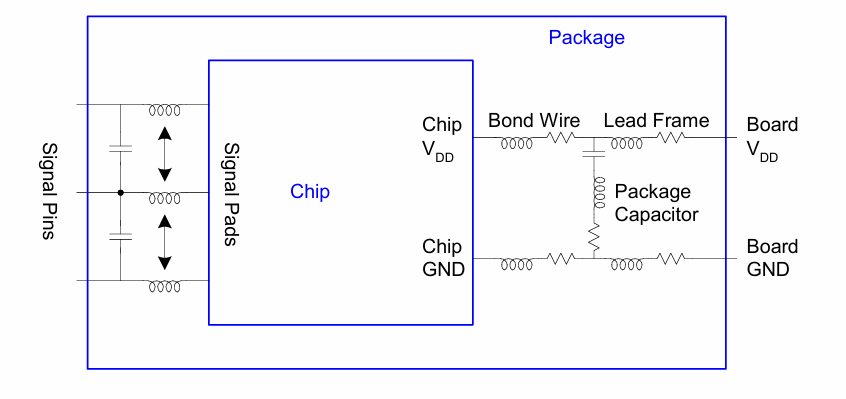
并且,随着IC产业的发展,一些先进封装技术如SiP,3D stacking, Die to Die,Chiplet等技术,脱离了物理保护的范畴,在架构层面实现了芯片性能的提升,从而成为在设计阶段就需要考虑的因素之一。
DFT(defign for test)
如上所述,随着工艺尺寸的scaling down,IC设计面临测试和验证成本的急剧提升。为此引入了DFT技术。一些典型的DFT技术如扫描链(Scan chain)技术,内建自测试BIST(build-in self test),JTAG等。
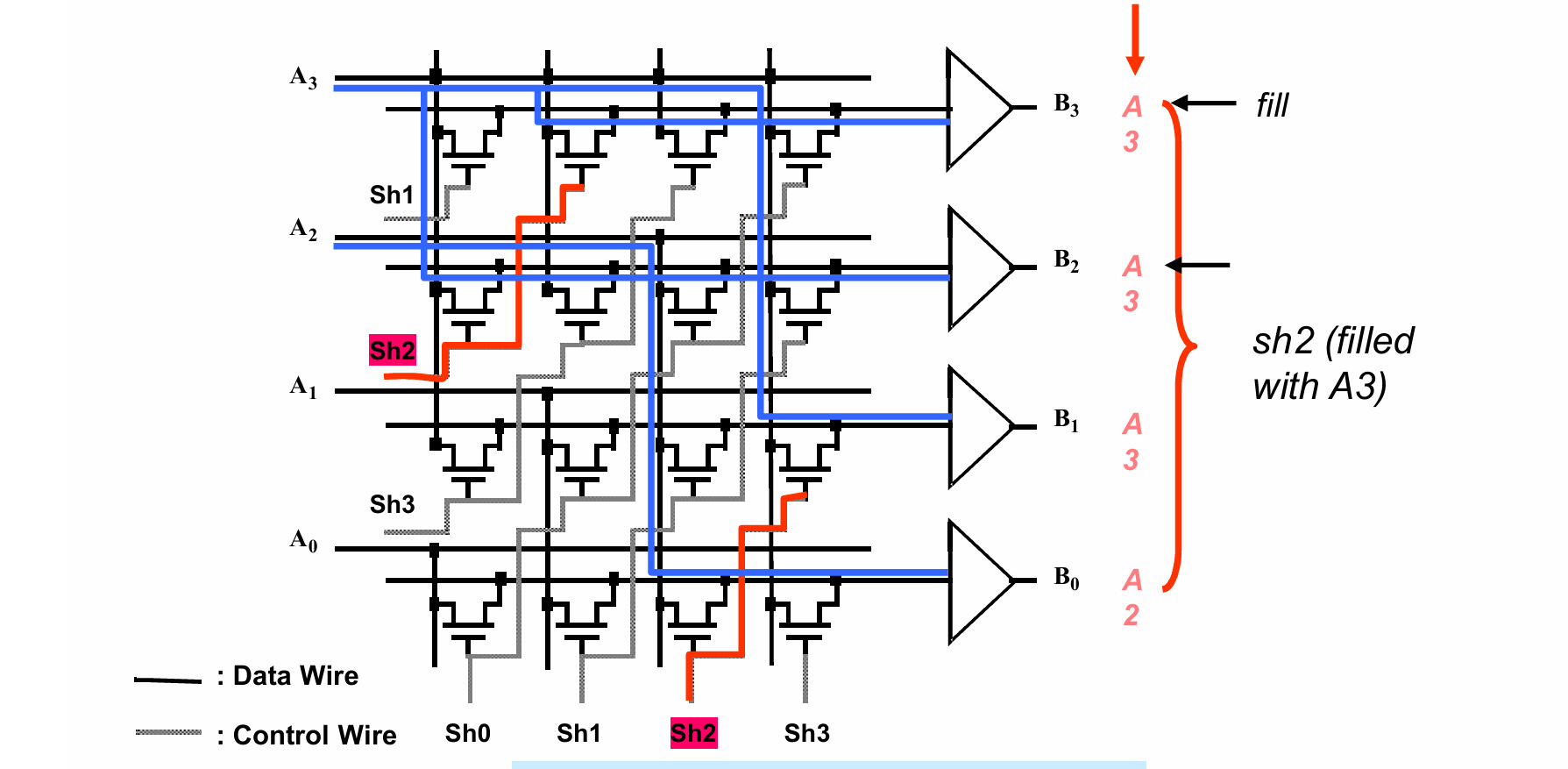
SCAN CHAIN
扫描链技术如下图: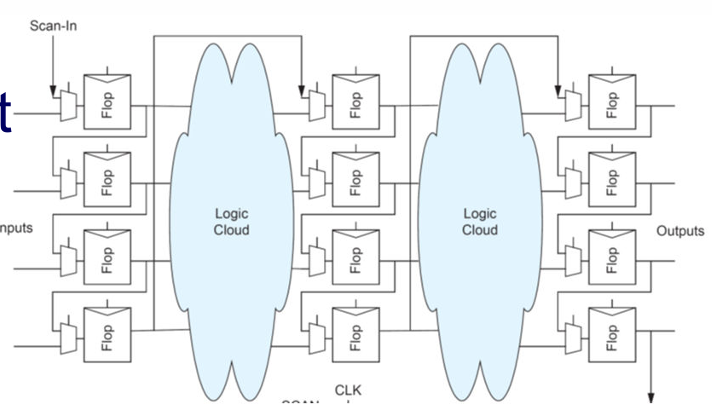
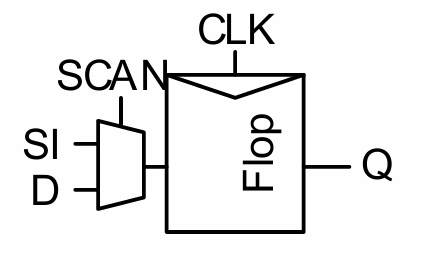
在每个寄存器的输入端口加入一个mux,形成一种scan register,并将每个寄存器的输出端和scan in段串联。
- 在常规模式下,电路正常工作
- 在scan 模式下,电路相当于一个shift register,每个寄存器中保存的结果被逐位的移动至输出端口(scan out),从而能够得到某一周期内电路的所有中间值,进行功能验证。
BIST
待补充
JTAG
待补充
数字IC设计的关心的一些指标
就IC设计而言,最关注的指标无疑是PPA(power,Performance,Area)。这三个指标往往相互约束,需要做出权衡取舍(trade-off)。
而数字IC设计领域,影响PPA的细分指标也有很多,下面分别简要进行介绍。
Fan-in 和Fan-out
fan in 指逻辑门连接的输入,fan-in越大,逻辑门本身的面积越大,同时性能也会越差。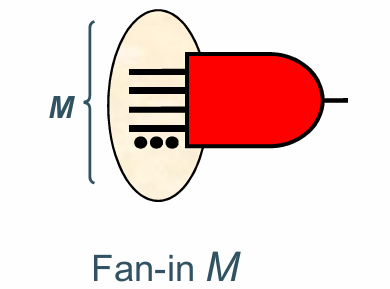
fan-out 指逻辑门连接的输出。fan-out越大,逻辑门需要驱动的下级电路越大,从而速度变慢。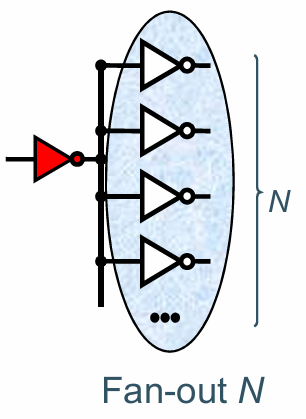
干扰(interference)及噪声(noise)
电路中那些预期之外的电压和电流信号被称为噪声,噪声往往影响电路的性能。
噪声的形成原因多种多样,常见的有平行线路之间的电磁串扰,电容直接的耦合(coupling)等。这些都造成电路信号的不稳定。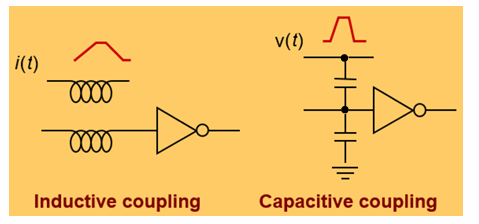
同时,来自电源(VDD)和地(VSS)的噪声也会影响信号。
噪声容限 Noise Margins
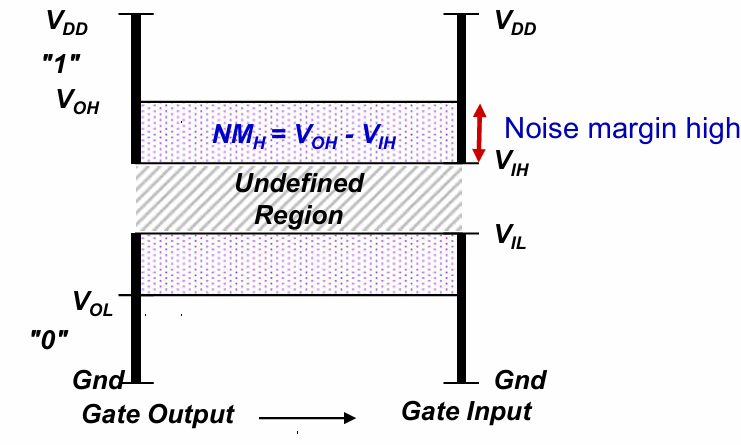
噪声容限一般分为高电平噪声容限$NM_H$和低电平噪声容限$NM_L$,代表电路对噪声的承受能力。它们分别定义为:
$$NM_H = V_{OH}-V_{IH}$$
$$NM_L = V_{IL}-V_{OL}$$
其中$V_{IL}$,$V_{IH}$,$V_{OL}$,$V_{OH}$的定义分别为:
- $V_{IL}$(Input Low Voltage):输入低电平电压。输入信号被识别为低电平(通常为“0”)的最大电压。
- $V_{IH}$(Input High Voltage):输入高电平电压。输入信号被识别为高电平(通常为“1”)的最小电压。
- $V_{OL}$(Output Low Voltage):输出低电平电压。输出信号被识别为低电平(通常为“0”)时的最大电压。
- $V_{OH}$(Output High Voltage):输出高电平电压。输出信号被识别为高电平(通常为“1”)时的最小电压。
传输延迟 Delay
电路的传输延迟参数定义如下图:
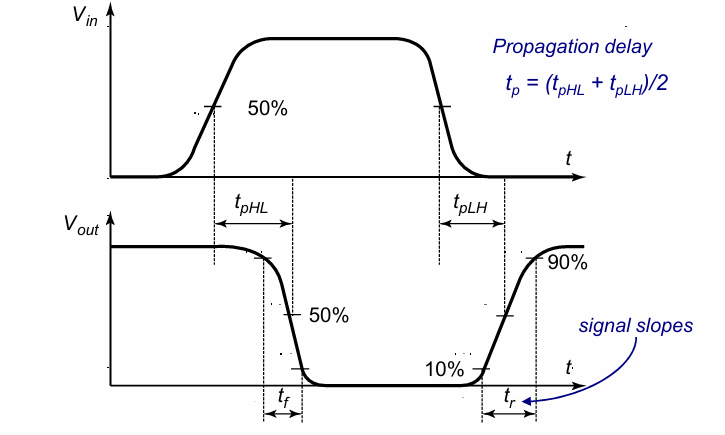
- $t_r$:电路从高电平的10%上升为高电平的90%所需要的时间。
- $t_f$:电路从高电平的90%下降为高电平的10%所需要的时间。
- $t_{pHL}$:输入信号上升为高电平的50%到输出信号下降为高电平的50%所需要的时间。
- $t_{pLH}$:输入信号下降为高电平的50%到输出信号上升为高电平的50%所需要的时间。
- $t_p$: $t_{pHL}$和$t_{pLH}$的平均值。
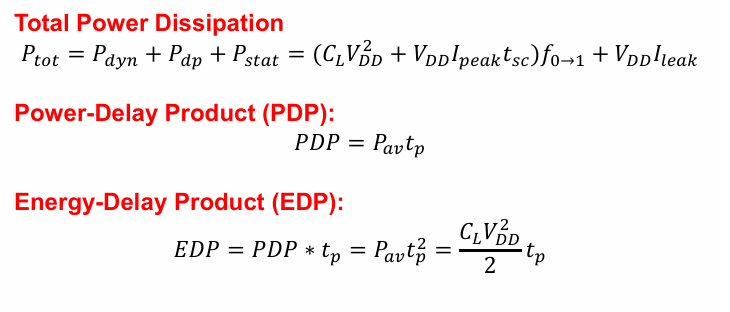
能效指标:PDP和EDP
PDP(power delay product):电路发生翻转期间的平均功耗与传输延迟的乘积,用于衡量电路完成一次计算所消化的能量。单位为焦耳($W\times s$)。
$PDP = P_{av}\times t_p$
EDP(Energy delay product):有时,一个具有低PDP的电路,传输延迟($t_p$)仍然有可能很大。为了找到在功耗和性能之间的最佳平衡点,可以将Power与Delay的平方相乘。即:
$PEP = P_{av}\times t_p^2 = PDP \times t_p$
在CMOS电路中,PEP一般与电源电压VDD成正比,较低的电压下往往能得到更好的EDP。
Lecture2 Device&Model
本节主要介绍集成电路中的基本器件:二极管和晶体管,以及对其进行分析的基本模型。
二极管Diode
掺杂
硅原子具有4个外层电子,在形成单质(单晶硅)时,每个晶格硅原子与周围的4个硅原子相连,形成正四面体结构: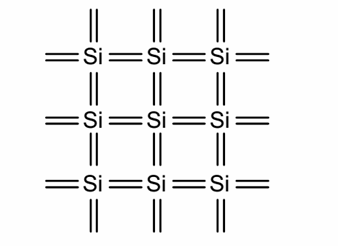
如果对硅单质中掺入少量的3价元素(如硼B),则在一个晶格中存在一个硅原子,其原子核周围缺少一个电子,或者说形成了一个带正电的空穴(free hole)。进行这类掺杂(doping)的半导体材料具有获得电子的特性(acceptors),称为P(posetive)型半导体。
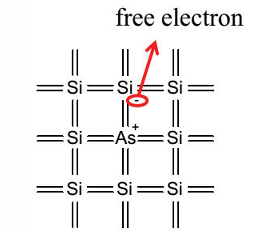
如果对硅单质中掺入少量的5价元素(如磷P,砷As),则在一个晶格中存在一个硅原子,其原子核周围多出一个自由电子(free electron)。进行这类掺杂(doping)的半导体材料具有失去电子的特性(donater),称为N(negetive)型半导体。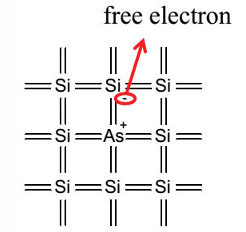
PN结
在将一块P型半导体和N型半导体进行接触之后,由于载流子浓度的不同,N型半导体中的自由电子便会自发向P型半导体的区域进行扩散(diffusion),对其中的空穴进行填充,形成扩散电流(diffusion current)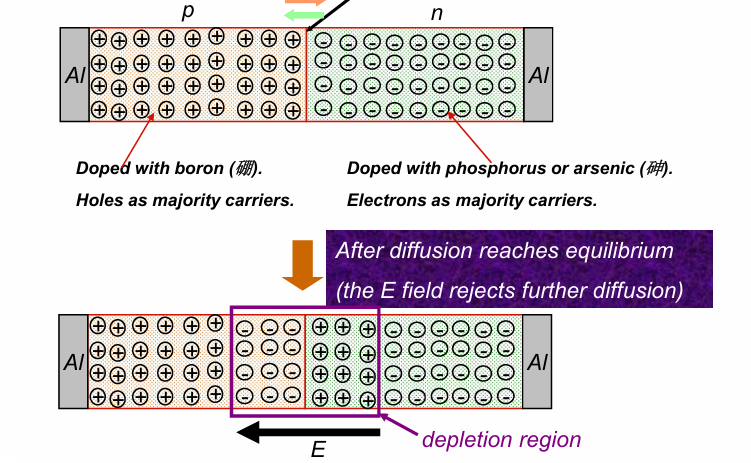
在这个过程中,N型半导体由于失去电子而带正电,P型半导体由于得到电子而带负电,从而在PN结内部形成一个从N指向P的内建电场。在内建电场的作用下,P区的电子反过来向N区运动,形成漂移电流(drift diffusion)
在自然条件下,PN结附近的扩散电流和漂移电流达到动态平衡。那些自发失去和得到电子的区域称为耗尽区(depletion region)。
在扩散作用达到平衡后形成的耗尽区具有如下特点: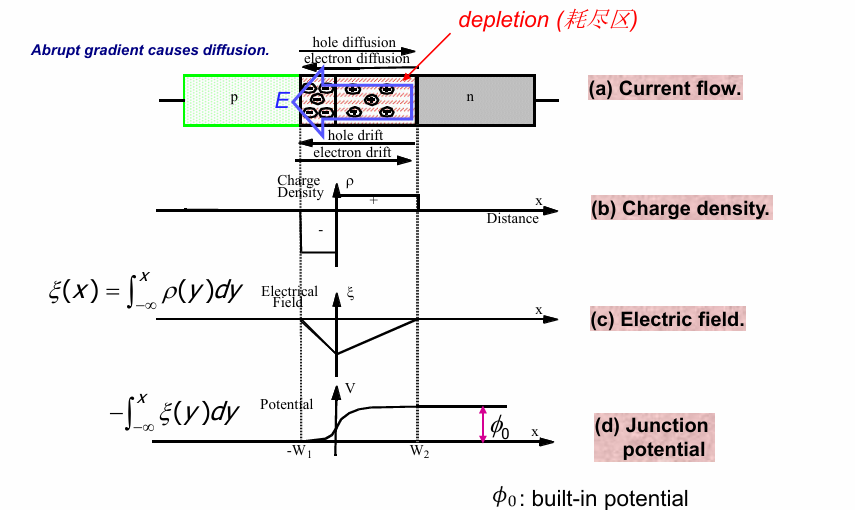
- 电子/空穴的密度均匀分布。
- 由于场强是电荷密度的积分,电子/空穴的均匀分布引起电场强调的线性分布。
- 由于电势是场强的积分,PN结中内建电势随坐标呈现递增分布。
耗尽区中内建电势的存在,会阻止载流子的运动,从宏观上看,降低了材料的导电能力。
偏置
二级结的构成为一个PN结和连接它们的金属,如下图: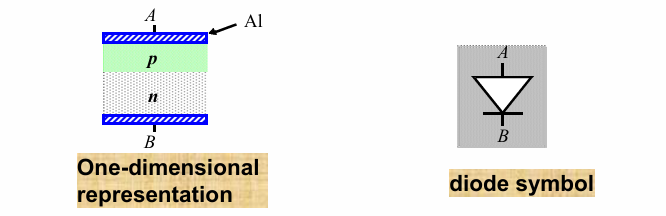
其电路符号为一个顶端带有一横线的三角,横线画在N型半导体的位置。
正偏
将二极管的P区连接电源的正极,N区连接电源的负极时,称为正偏(forward bias):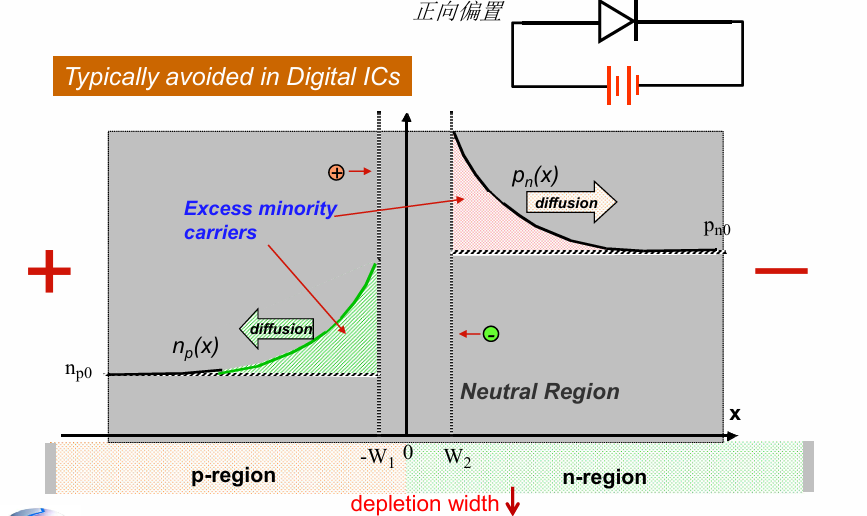
正偏后, 施加使得PN结内部的内建电势下降,耗尽区的宽度减小,从而减小了载流子通行的难度。P区的大量空穴和N区的大量电子(这是由掺杂浓度决定的,即空穴在N中为多子,电子在P中也为多子)能够成功穿过耗尽区,从而形成电流。此时占据主导的是扩散电流,导电主要由器件中的多子完成,电流较大。
反偏
将二极管的P端连接电源负极,N端连接电源正极,称为反偏(reverse bias):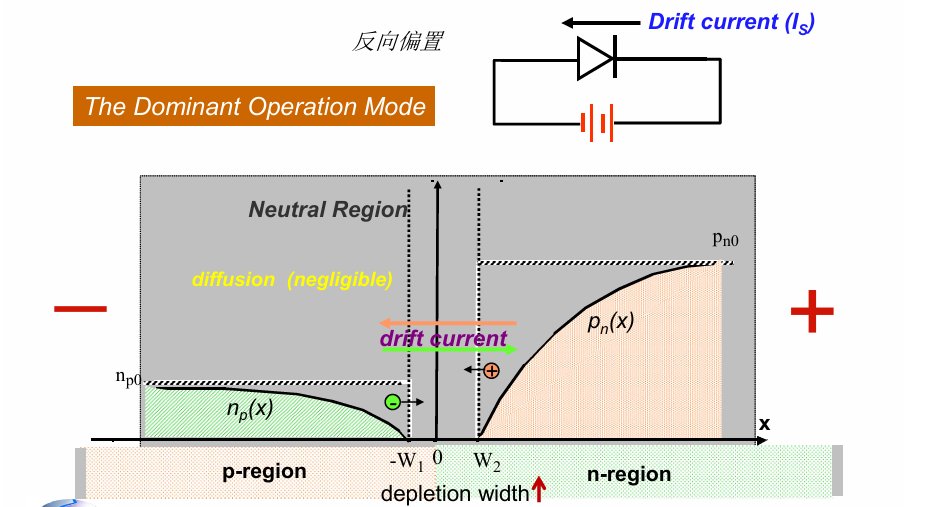
反偏后,外加电源强化了二极管内部的内建电场,从而使载流子穿过耗尽区的难度增加,只有P区中的少数电子和N区中的少数空穴在电场作用下穿过耗尽区,形成电流。此时占据主导的是漂移电流,导电主要由器件中的少子完成,电流较小。
I-V特性
二极管的电流公式为:
$$ I_D = I_s(e^{\frac{V_D}{\phi_T}}-1)$$
其中$\phi_T=\frac{kT}{q}=26mV$
$I_s$为饱和电流,与二极管的掺杂,PN结面面积有关。
在一定情况下也可作一阶近似: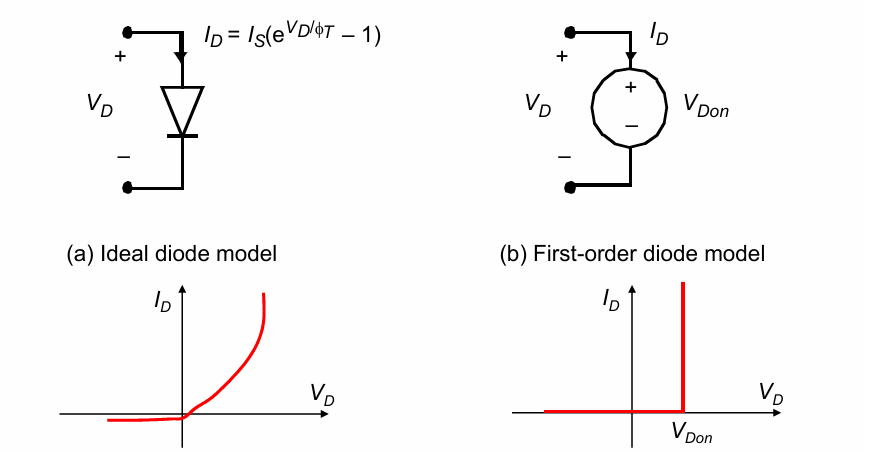
结电容
PN结电容公式为:
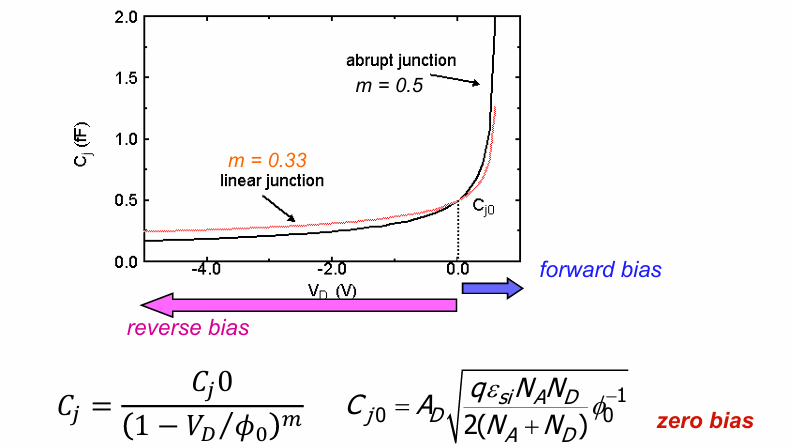
通过对上述公式定性分析可知:施加正偏电压,$C_j$的分母减小,整体结电容增大。一种理解角度是,正偏后耗尽区减小,相当于减小了平行板电容器的间距,从而增大了电容。
MOS晶体管的静态模型
MOS器件的剖面图如下: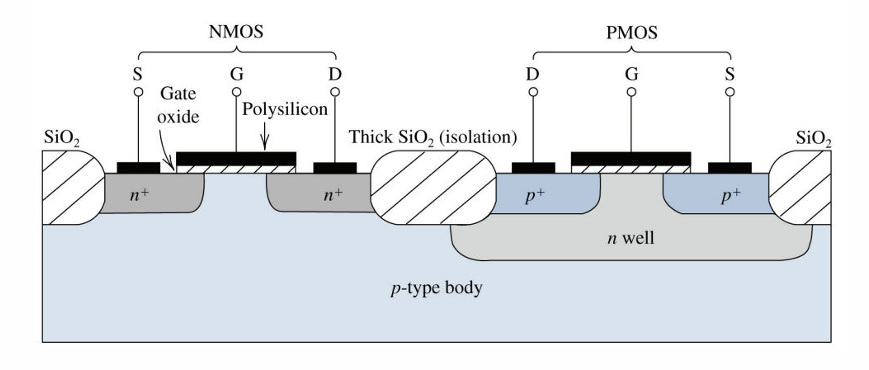
一个晶体管一般可以抽象成一个开关,当gate端施加足够大的电压(超过阈值电压),则开关打开。
阈值电压
晶体管的gate端可以看作一个平板电容,当施加电压足够高时,在下方的衬底中感应出一定的电荷,形成导电沟道。
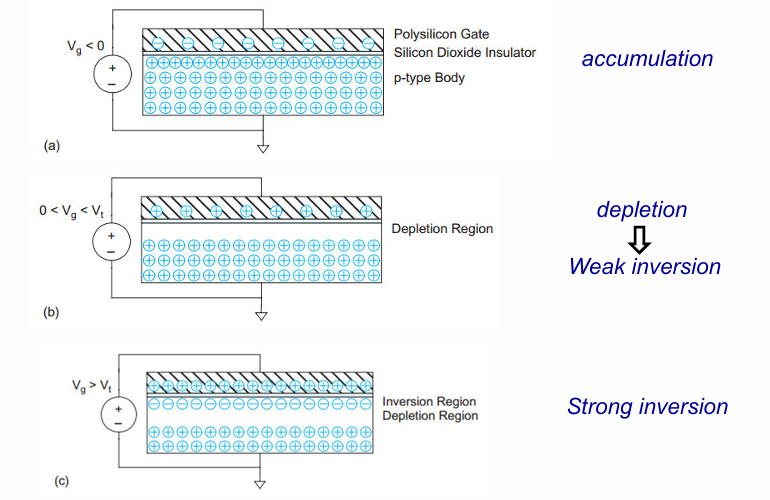
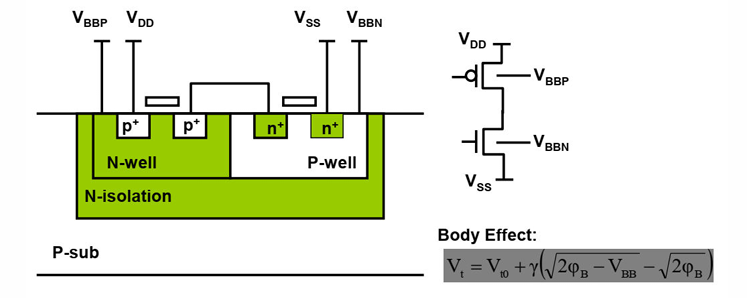
阈值电压的计算公式:
$$V_T = V_{T0} + \gamma (\sqrt{|-2\phi_F+V_{SB}|}-\sqrt{\phi_F})$$
其中:$V_{SB}$是源和沉底之间的电压,$V_{T0}$是$V_{SB}=0$时的阈值电压,由制作工艺决定。$\phi_F$是费米能级。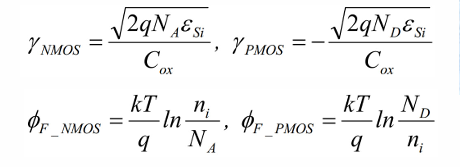
体偏效应
通过上述公式我们可以知道,阈值电压与体源电压有关,从而可以通过条件body端的电压实现阈值电压的条件。这样的方法常被用于低功耗技术中。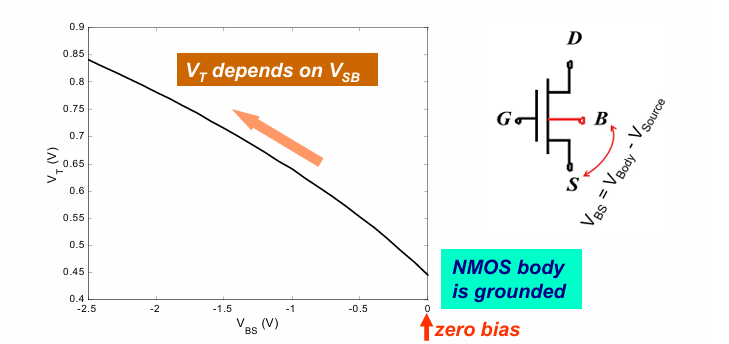
短沟道效应 short channel effet
随着晶体管尺寸的scaling down,器件的沟道长度逐渐缩短,由于工艺导致源漏之间的耗尽区变得接近,使得阈值电压降低,影响晶体管的开关特性。
漏致势垒降低效应(DIBL)
Drain-induced barrier lowering:在经典的长沟道器件中,阈值电压的值与漏区电压无关。然而在短沟道器件中,由于晶体管在工作时会给漏级施加电压,从而在D-B之间形成了一个反偏的二极管。这个反偏的二极管增大了漏极的耗尽区宽度,使其与源极的耗尽区进一步接近,从而进一步缩小了导电沟道的长度,使得阈值电压下降。
DIBL本质也是一种短沟道效应。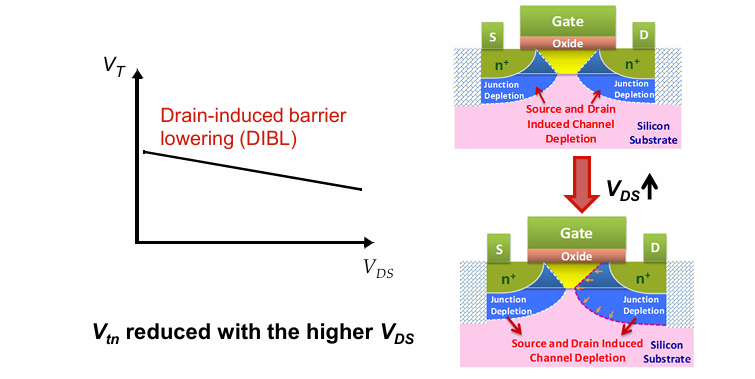
窄沟道效应 narrow channel effet
不同于短沟道效应,窄沟道效应是指当晶体管的沟道宽度(不是长度)变窄时,阈值电压增大的一种现象。这是由于窄沟道的gate端容易与场氧化层重叠,形成更大的GATE电容。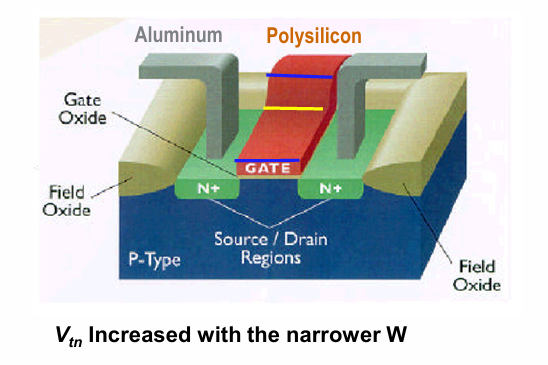
对晶体管的建模
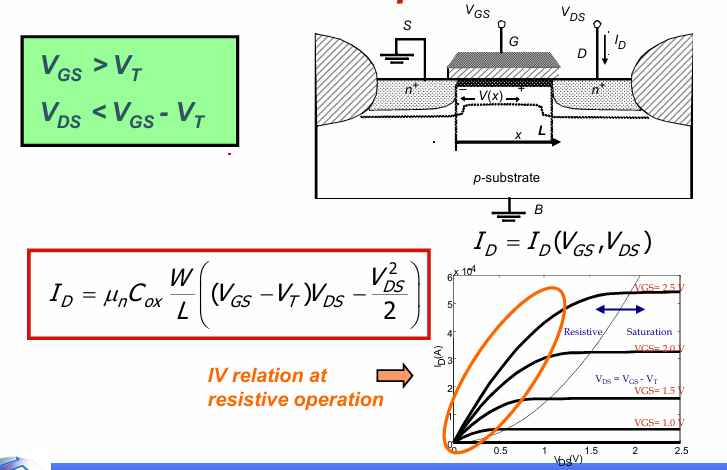
晶体管可以被看做是个 G,S,D,B的3端器件。在使用时,一般NMOS的衬底默认会接VSS,PMOS的衬底接VDD,从而简化为一个G,S,D的3端器件。在G S间的电压负责控制晶体管的开关,DS间的电压负责控制管子电流的流通。
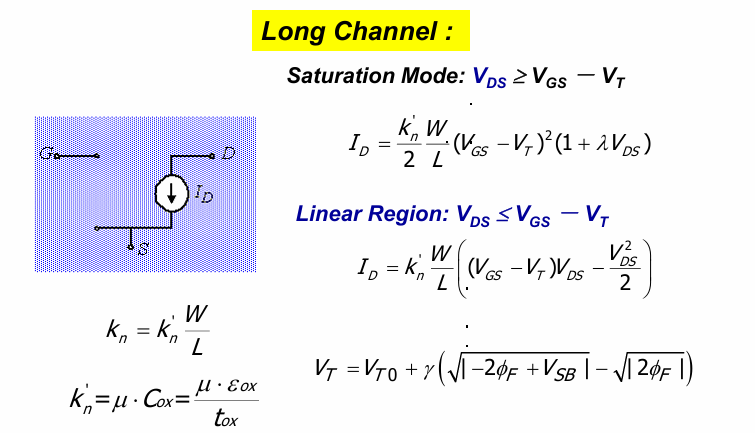
线性区
当晶体管满足:
$$V_{GS}> V_T$$
$$V_{DS}< V_{GS}-V_T$$
管子工作在线性区,此时晶体管的电流大小满足:
饱和区
当晶体管满足:
$$V_{GS}> V_T$$
$$V_{DS}\geq V_{GS}-V_T$$
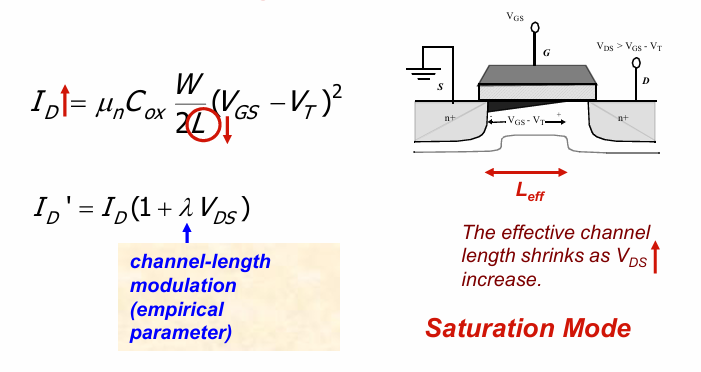
电流不再随$V_{DS}$增大而增大,而是只与$V_{GS}$有关: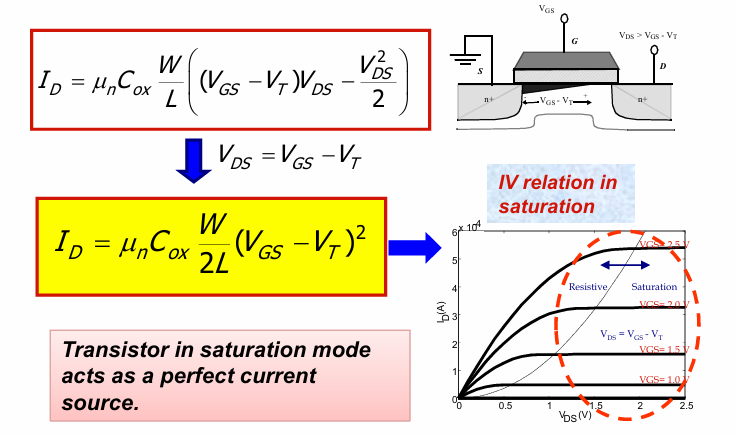
此时的晶体管可以被看做是一个理想电流源。
沟道长度调制 Channel Length Modulation
如下图,当$V_{DS} > V_{GS}-V_T$时,靠近漏区部分的沟道实际上会无法感应出反型电荷而产生夹断(pinch-off)。这将导致晶体管的有效沟道长度减小。而晶体管的电流与沟道长度L成反比。因此实际的电流会增大。通过添加一个参数$\lambda$来修正这种沟道长度调制效应:
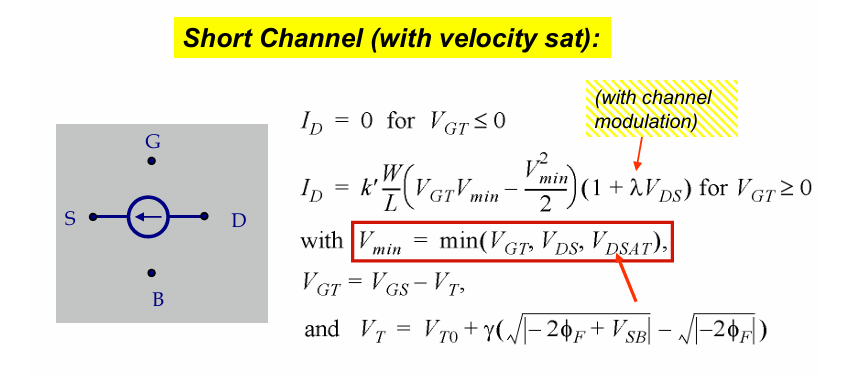
速度饱和 Velocity Saturation
一般来说,载流子的速度正比于电场强度,但是当速度过大时,会因为载流子间的散射效应而趋于饱和,不再满足线性关系。在源漏电压不变的情况下,沟道越短,沟道间的电场强度越大,从而越容易达到速度饱和。
而对同一器件,则存在一个饱和电压$V_{DSAT}$,当源漏电压大于该值是,出现速度饱和。速度饱和会降低饱和区电流。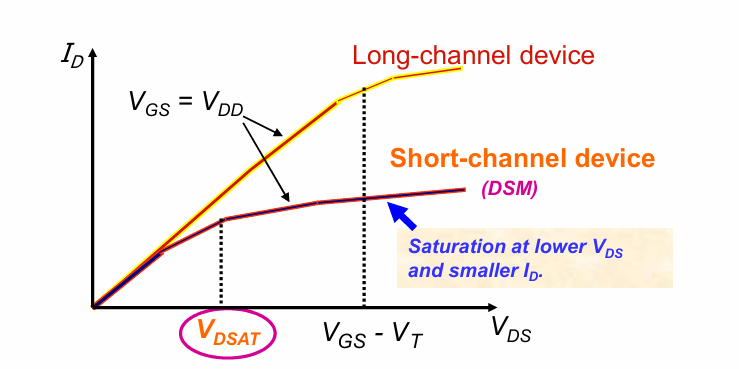
电流公式
结合上述分析,可以分别得到长沟道器件和短沟道器件的电流公式:
电阻计算
MOS器件的等效电阻可以用如下公式计算: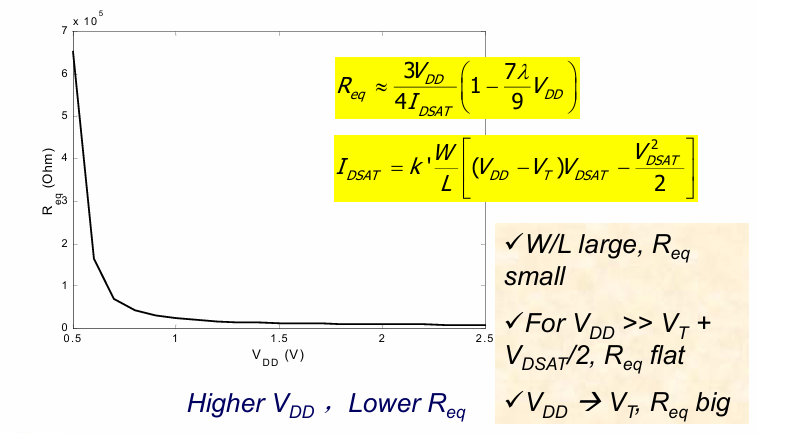
可以看到,同样的器件,在VDD减小的情况下,等效电阻急剧增大。这也是阻止器件的VDD无法随器件尺寸同步scaling down的一个原因。
晶体管的动态模型
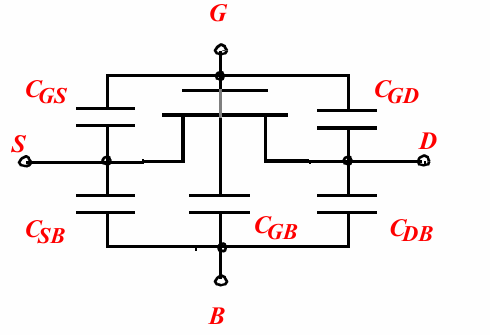
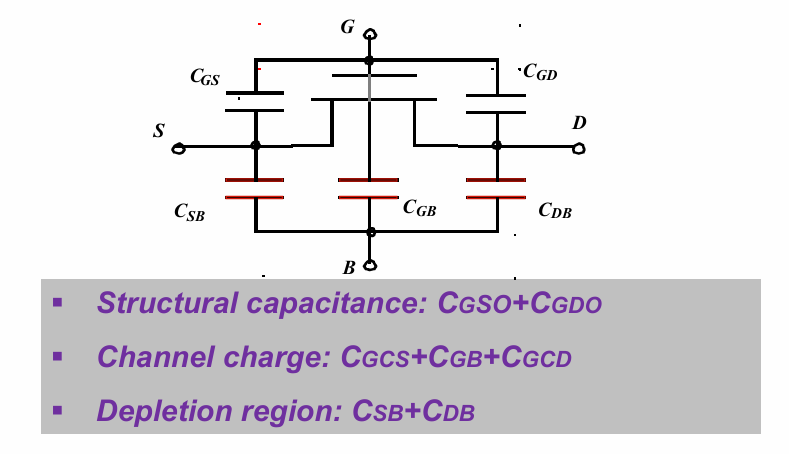
作为一个4端器件,MOS管的电容主要由3部分组成:
- 结构电容
- 沟道电容
- 结电容
下面依次进行分析:
结构电容
这部分的主要成因是MOS管在实际生产时,源和漏会向栅下方扩展一个$x_d$的长度,引起了栅和源漏之间的寄生电容: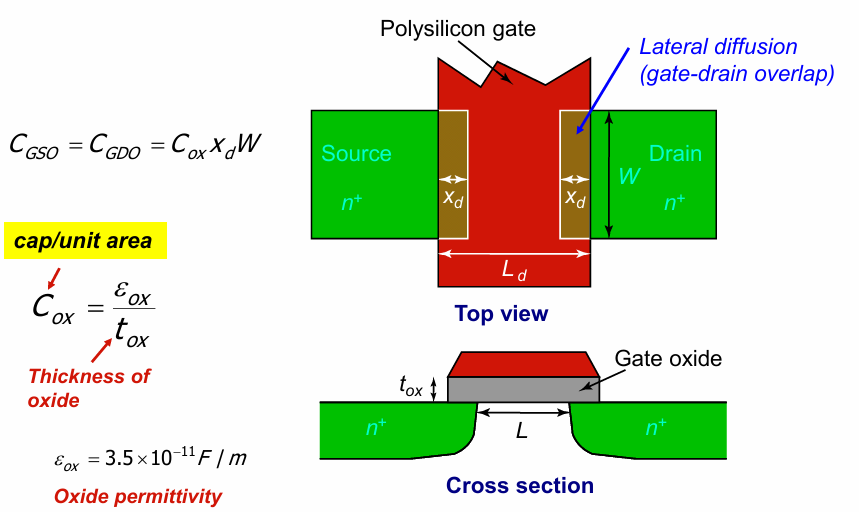
沟道电容
向栅极施加电压,在下方形成导电沟道,这个过程也是电容充电的过程。在这个过程中,gate 端与S,D,B间形成的电容大小与晶体管的工作状态有关,总结如下: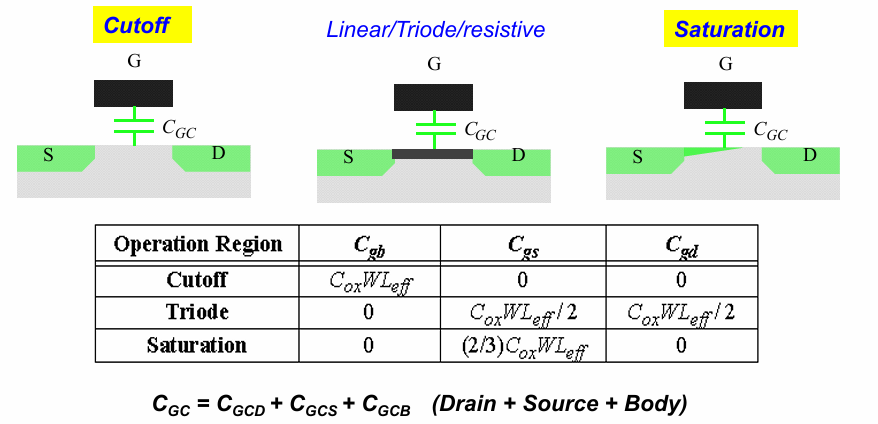
结电容/扩散电容
最后一部分电容的形成原因如下:考虑一个NMOS,其制造是在一个P衬底上挖出2个N well,这样源漏和衬底之间实际上存在一个PN结,这个PN结在D极施加电压时是反向导通的,但是也具有一定的电容。此外因为MOS管实际是一个立体的结构,源漏区除了与底板之外,与侧壁之间也会形成PN结。
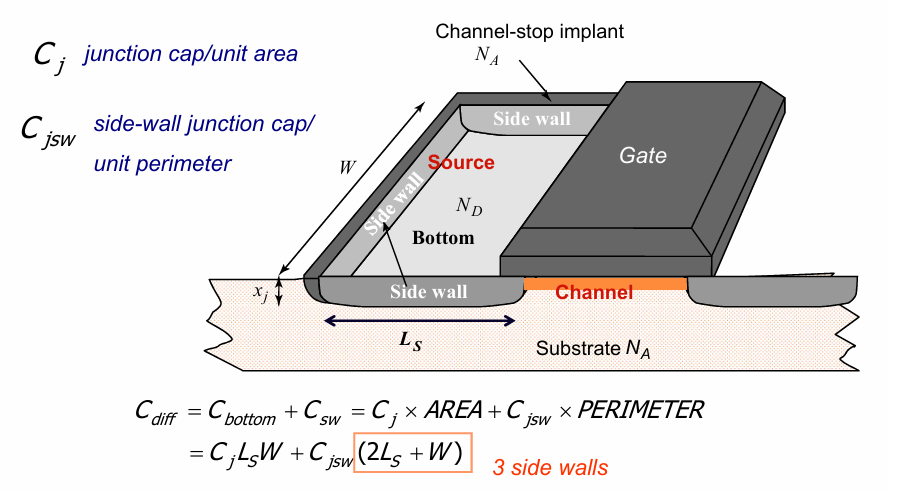
总结上述电容,就可以得到晶体管的电容模型:
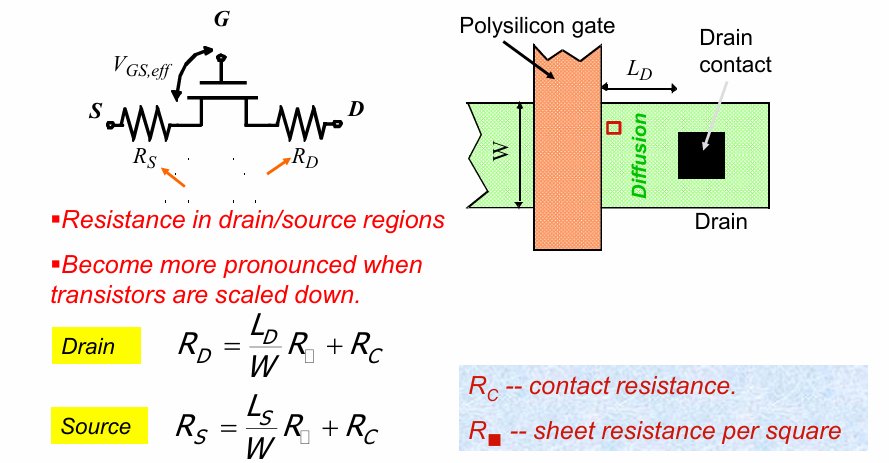
源-漏电阻
晶体管的电阻可能进一步受到源漏电阻的影响:
先进器件
略
Lecture3 Inverter
反相器是连接器件到电路的桥梁,因此对反相器的研究可以起到很好的承上启下的作用。
概述
电路
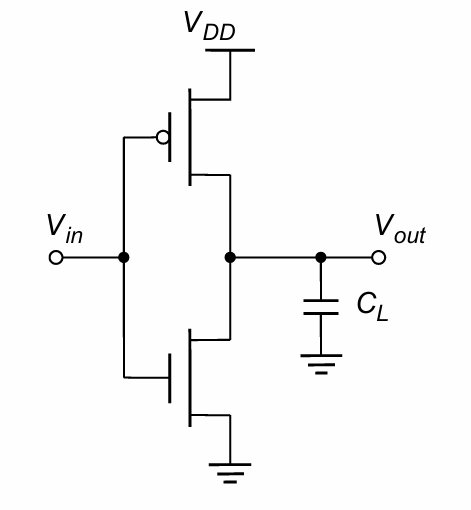
反相器的电路图如图所示。由gate 和drain端相连的一个PMOS和一个NMOS组成,当输入为高电平时,P管关闭而N管打开,VOUT为低电平。输入为低电平时则相反,N管打开而P管关闭,VOUT被拉高。
瞬态响应
反向器的瞬态响应,可以看作是通过P管和N管对于负责电阻$C_L$的充放电过程:
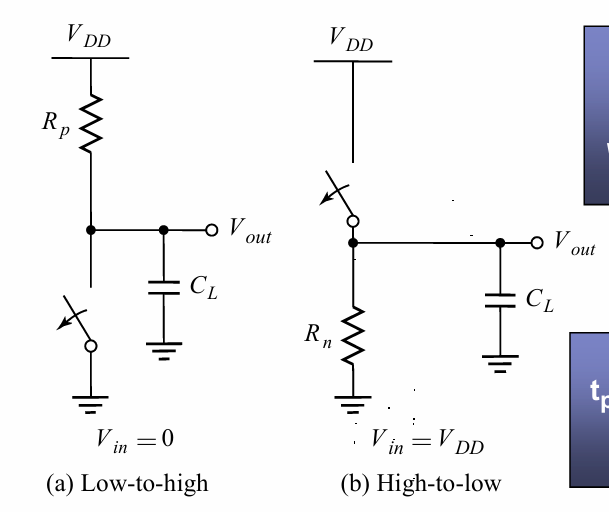
根据基本电路理论,其传输延迟为 $t_p= ln2 \cdot RC = 0.69R_{on}C_L$
传输特性曲线
反向器的传输特性曲线如下:
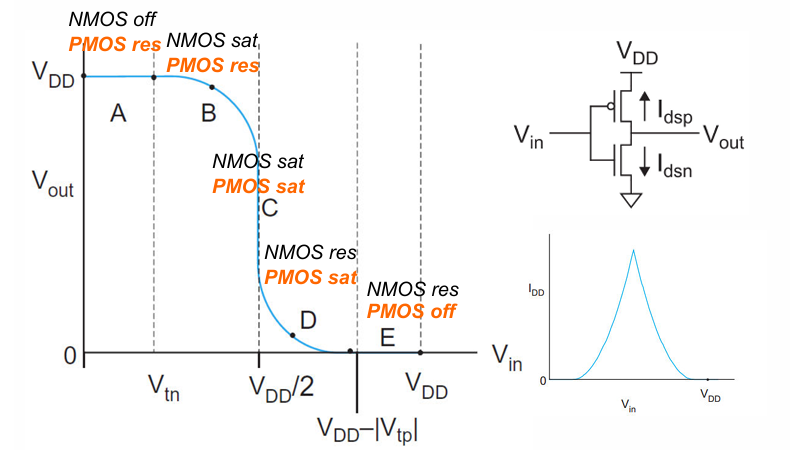
需要注意的是,在CMOS电路中,在稳定的工作状态下,不存在从VDD到VSS的直接电流,只有在状态翻转的过程中有一个瞬时的大电流。
翻转阈值
将反相器的翻转阈值定义为:
$$V_M = V_{in}=V_{out}$$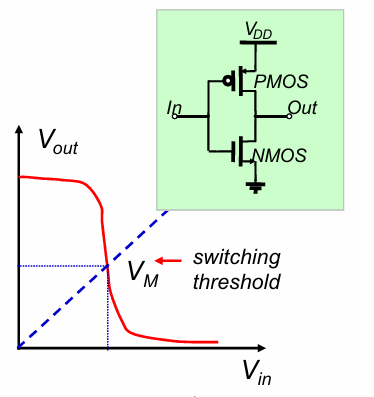
根据上述公式,在该点下,P管和N管均处于饱和状态($V_{ds}=V_{gs}$),假设晶体管为短沟道器件,达到速度饱和,带入电流公式:
$$I_D = k’\frac{W}{L}((V_{GS}-V_T)V_{DSAT}-\frac{V_{DSAT}^2}{2})$$
可以解得:
当VDD的值相比晶体管的阈值电压和饱和电压相比足够大时,简化为“
$$V_M \simeq \frac{rV_{DD}}{1+r}$$
由于r 是一个与P N管宽度只比相关的参数,因此可以通过调节PN管的比值来调节$V_M$的大小:
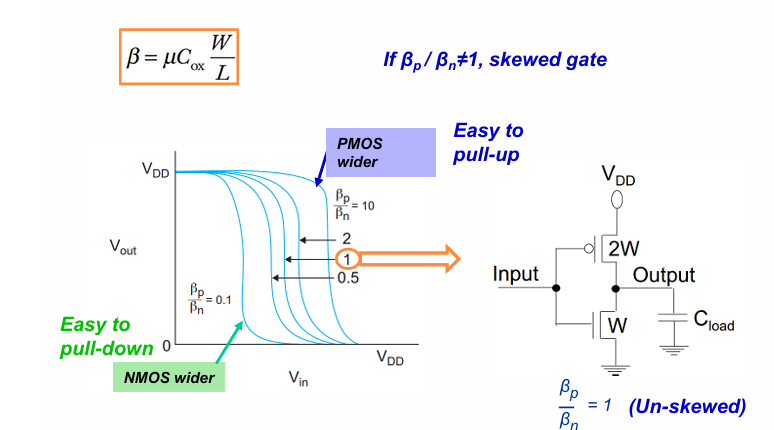
一般来讲,当$\frac{W_p}{W_n} = 2$时, $V_M$接近$V_{DD}$的一半。
$V_{IH}$,$V_{IL}$与噪声容限
对于反相器而言,将VTC曲线的斜率为-1(增益为-1)时Vin的值定义为$V_{IH}$,$V_{IL}$
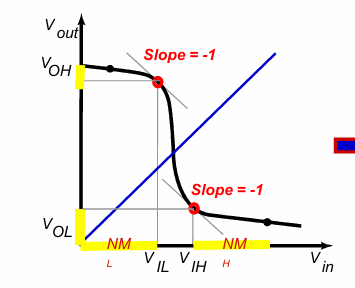
而数字设计中,往往采用线性分段近似的方式,通过求得$V_M$处曲线的斜率g,确定$V_{IH}$和$V_{IL}$:
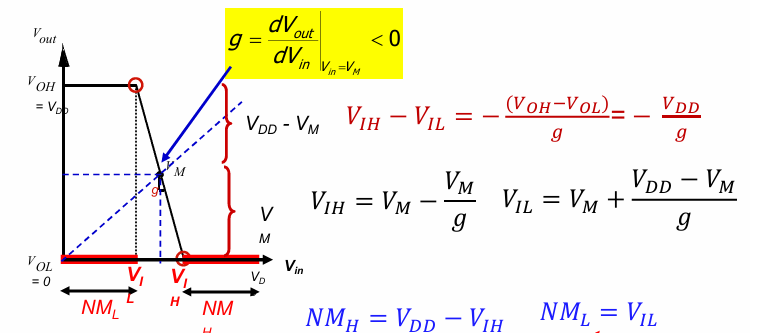
此时假设$V_{OL}=0$,$V_{OH}=V_{DD}$,计算得到相应的噪声容限。
传输增益
略
负载电容
接下来分析反相器的负载电容。假设2个反相器进行串联,分析其负载电容$C_L$:
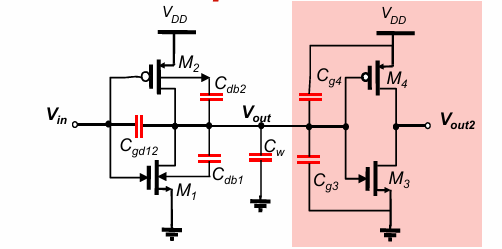
$C_L$的组成包括:
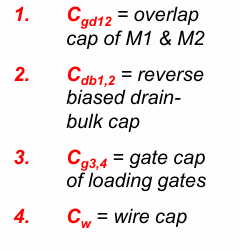
栅漏电容 $C_{gd}$
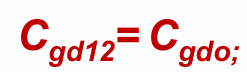
$C_{gd12}$指12这两个管子的栅与漏之间的电容,如之前在器件一栏分析的,该电容一方面由栅极的覆盖(栅氧化层)电容有关,另一方面与栅极电压感应出的沟道电容有关,即:
$$C_{gd} = C_{gdO} + C_{gcd}$$
其中栅氧化层电容$C_{gdO}$的值是固定的,而沟道电容$C_{gcd}$与晶体管的工作状态有关。对其进行分类讨论如下:
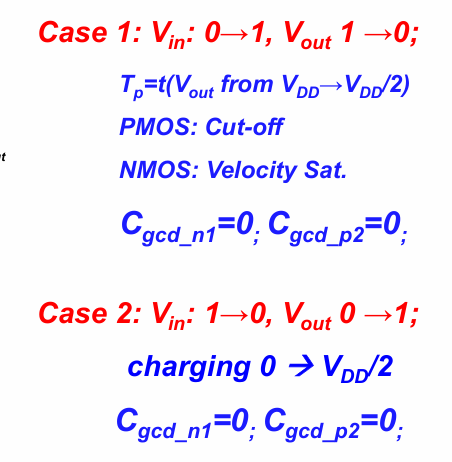
可见无论何种工作状态下,沟道电容均为0,故栅漏电容只等于覆盖电容:
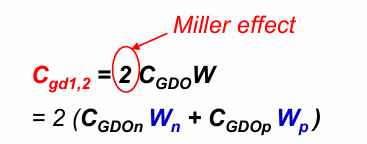
此外,需要考虑晶体管的米勒效应,将浮空电容用2倍的接地电容来替换,最终结合版图计算得到的栅漏电容$C_{gd1,2}$为:
漏体电容$C_{db1}$和$C_{db2}$
漏体电容$C_{db1}$和$C_{db2}$来自漏体之间反向偏置的PN结形成的结电容,满足PN结的电容公式。为了简化计算,一般采用一些线性公式进行近似。
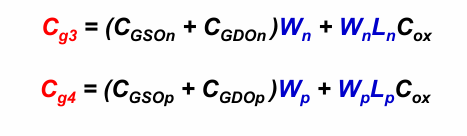
扇出的栅电容$C_g$
假设栅电容为扇出的栅上的总电容,有:
连线电容 $C_W$
$C_W$ 的值与具体工艺相关
将上述所有电容加和,便得到反相器的负载电容$C_L$
传输延迟
如前所述,对反相器的传输延迟的分析可以近似为一个一阶的RC模型: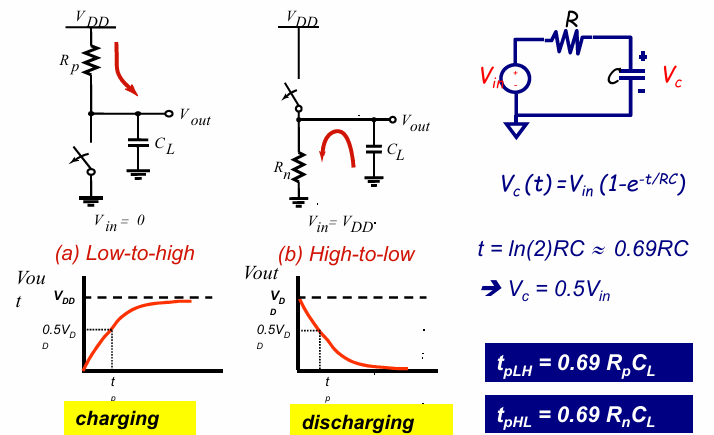
之前的分析已经计算出了反相器的负载电容,接下来需要考虑反相器工作时的等效电阻。
对等效电阻的分析如下: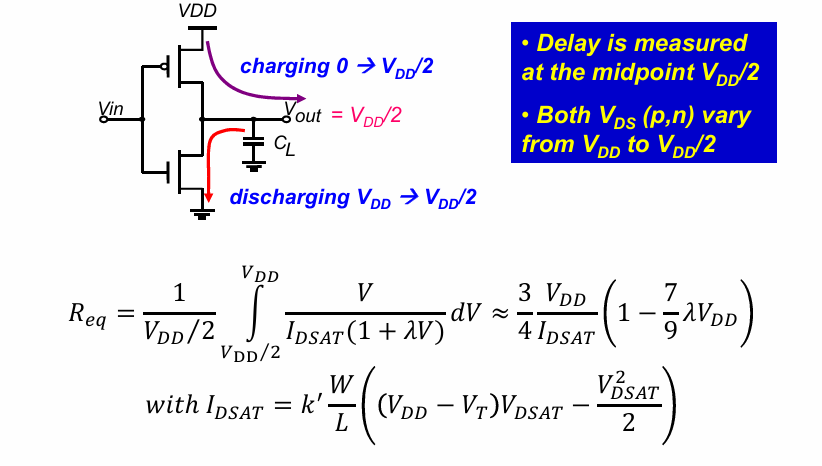
可以看到,正如前面强调过的,等效电阻是一个与电源电压VDD相关的参数,且与VDD负相关。
当计算传输延迟时: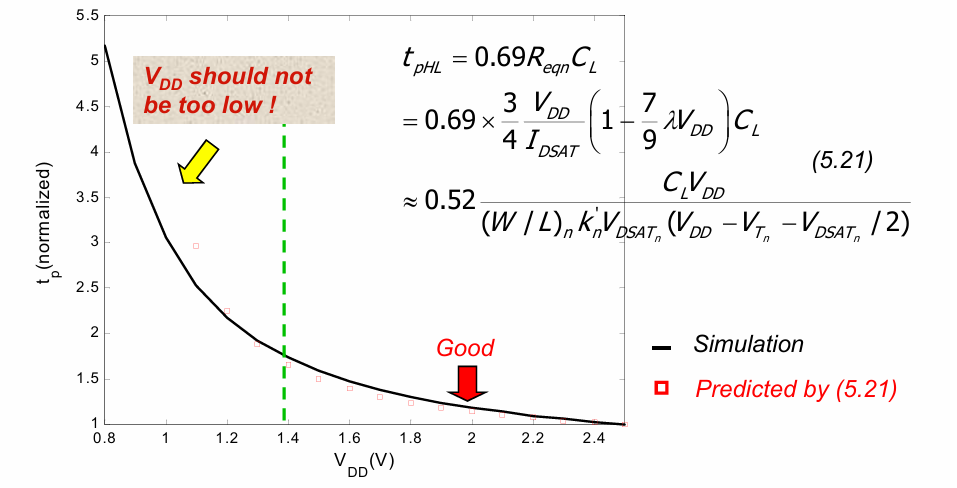
可以发现随着工作电压的提高,传输延迟也会下降,从而电路的性能提升。这也符号我们的一般直觉,即电压越高,对电路的”驱动”能力越强。
此外,传输延迟也与输入信号的变化有关:
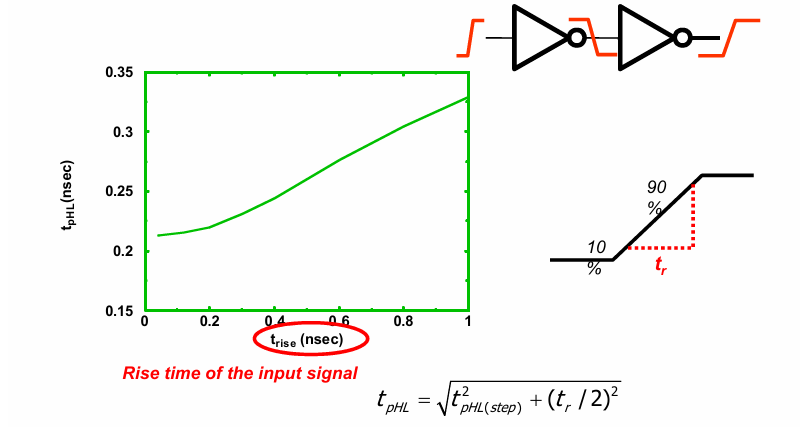
由于输入信号并非理想信号,其变化时间也需要被考虑在传输延迟之内。
晶体管尺寸比例的确定
在上一节中,为了是传输特性曲线VTC对称,得出P管和N管的比例系数$\beta$约为2。而对称的VTC并不意味着总延迟(high to low 和low to high之和)最小。
实际的实验结果如下:
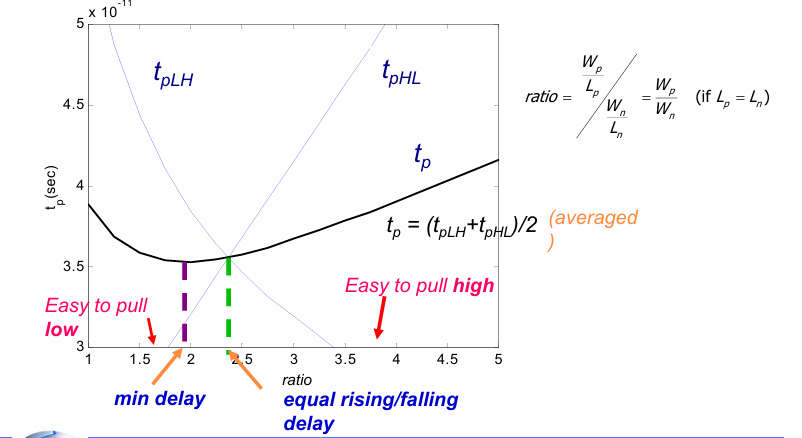
可以看到,相等上升和下降传输延迟(2.4)与总延迟最小(1.9)的比例系数并不相等。
好在它们都在2附近,于是$\beta=2$便成为默认比例系数。
sizing的影响
在上述分析中,我们总是假设晶体管的负载电容为$C_L$,然而事实上,$C_L$可以包含2个部分:本征电容$C_{int}$与外部电容$C_{ext}$。还是用之前2个反相器相连的例子:
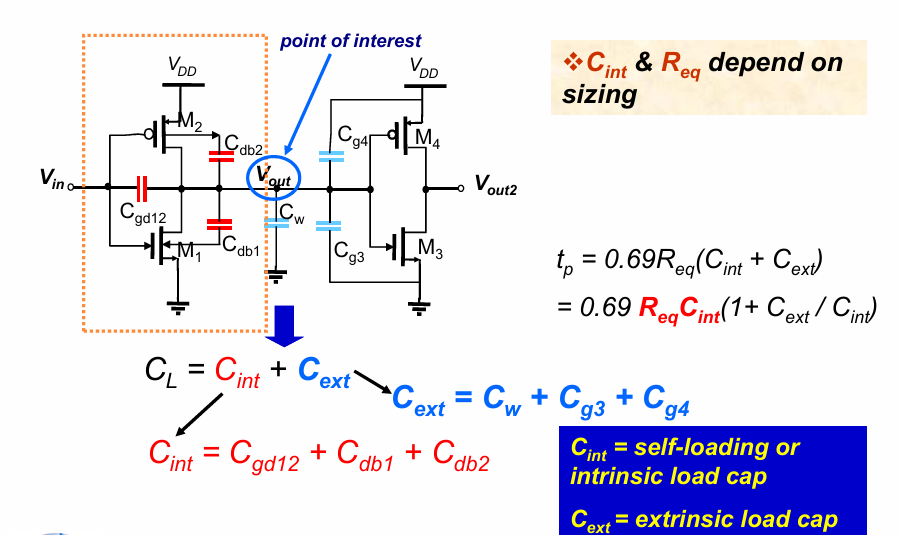
将$f = \frac{C_{ext}}{C_{int}}$称为等效扇出。
当反相器的尺寸整体扩大S倍时,其电容大致扩大为原来的S倍,而电阻却下降为原来的1/S,这使得延迟参数$R_{eq}C{int}$不变。而由于sizing增大了本征电容的值,使得$\frac{C_{ext}}{C_{int}}$变小,从而整体的传输延迟变小。
即:在外部负载电容不变的情况下,反相器的尺寸越大,其”驱动”能力越强,传输延迟越小。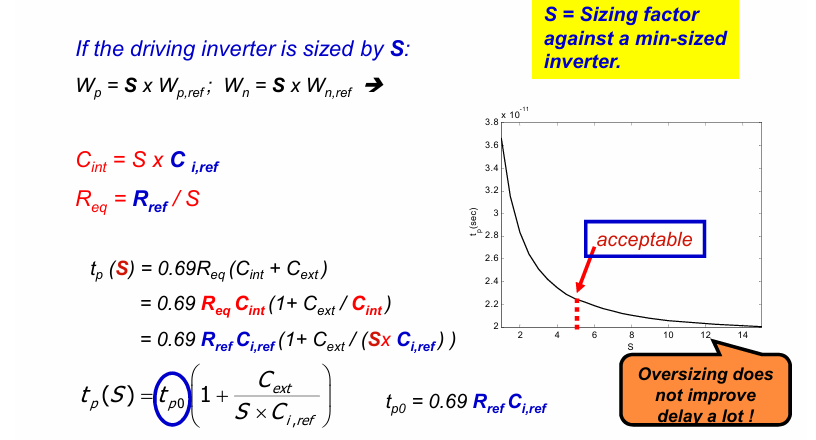
同时需要注意的是,由于延迟与sizing的系数成反比,随着S的增大,在延迟的收益上会逐渐减小,无法通过sizing的方式无限降低延迟。
* 对传输延迟的sizing优化
在对反相器的sizing有了基本认识后,可以考虑对传输延迟进行优化。
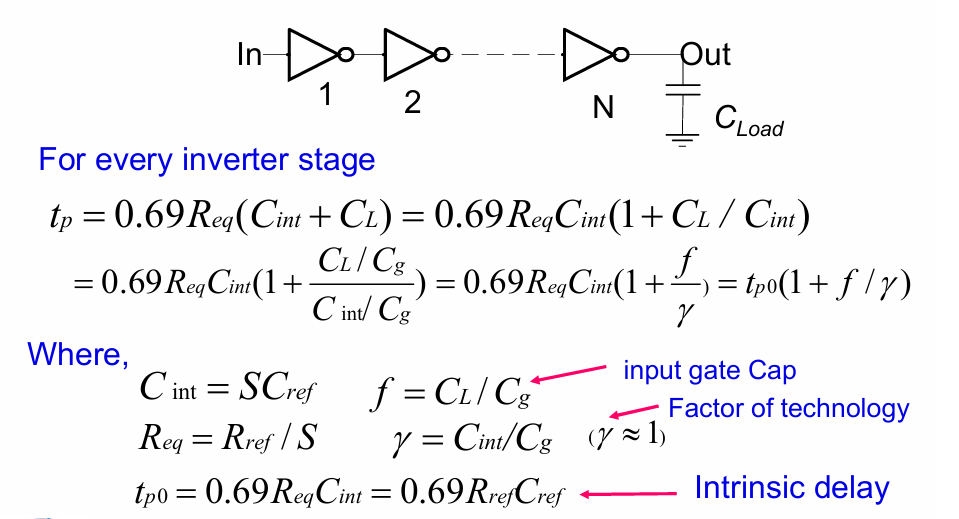
考虑如下图所示的一个反相器链(inverter chain)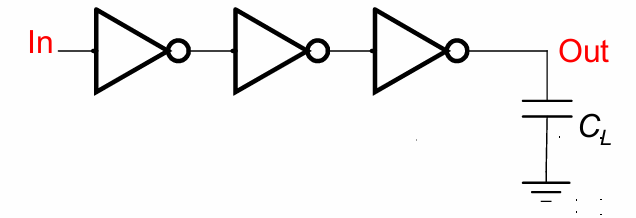
对于反相器链中间的任意一个inverter来说,其输出负载($C_{ext}$)是下一级反相器的栅电容$C_g$,而其自身的栅电容是上一级反相器的输出负载。
对于反相器而言,本征电容和栅电容成线性关系:
$$C_{int} = \gamma C_g$$
对于亚微米工艺,$\gamma \simeq 1$
于是对第j级有:
$$t_{p,j} = t_{p0}(1+\frac{C_{g,j+1}}{\gamma C_{g,j}})$$
考虑整个N级反相器链的传播延迟,有:
$$t_p =t_{p0} \sum_{j=1}^{N}(1+\frac{C_{g,j+1}}{\gamma C_{g,j}})$$
其中$C_{g,N+1} = C_L$
利用均值不等式求其最小值,可得:
$$\frac{C_{g,j}}{C_{g,j-1}} = \frac{C_{g,j+1}}{C_{g,j}}$$
即:每一级的反相器都相比前一级放到相同的倍数,记为f,满足:
$$F = f^n = \frac{C_L}{C_{g,1}}$$
$$t_p = Nt_{p0}(1+\frac{\sqrt[n]{F}}{\gamma})$$
对于一个级数不确定的反相器链,为了确定其最优传输级数,将上式对N求导(已知$\frac{\partial \sqrt[x]{y}}{\partial x} = -\frac{1}{x^2}\ln y \cdot \sqrt[x]{y}$),另导数为0,可以得到:
$$f=e^{(1+\frac{\gamma}{f})}$$
上述超越方程只有一个解,当$\gamma = 1$时,f=3.6,解得:
$$N = \frac{lnF}{lnf}$$
功耗
CMOS电路的功耗分为2种:
动态功耗:逻辑状态进行翻转时的功耗
静态功耗: 逻辑状态保持时的漏电流产生的功耗
CMOS反相器的功耗产生主要有以下几个方面:
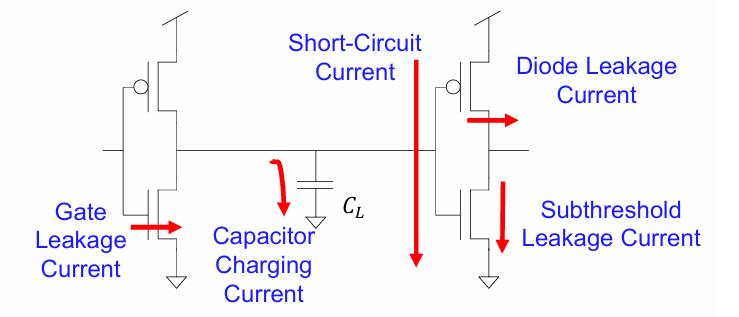
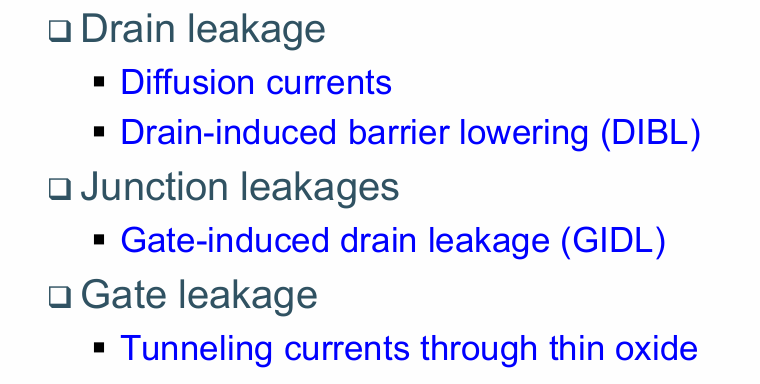
- gate 端的漏电流
- 负载电容的充放电
- 进行翻转时的短路电流
- 漏极PN结的反偏电流
- 晶体管关断状态下的亚阈值漏电流
其中,主要的功耗来自逻辑翻转时产生的动态功耗。
动态功耗
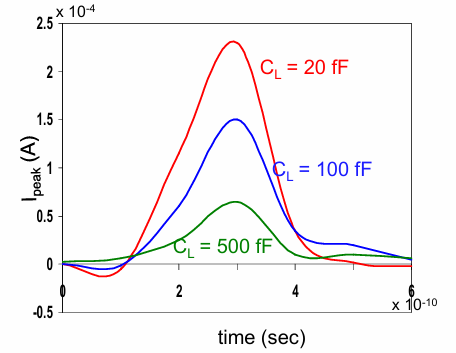
当逻辑进行翻转时,PN两个管子同时导通,相当于产生了从VDD到VSS的短路电流。在上下其中一个管子关闭后,该电流需要对负载电容进行充放电,如下图:
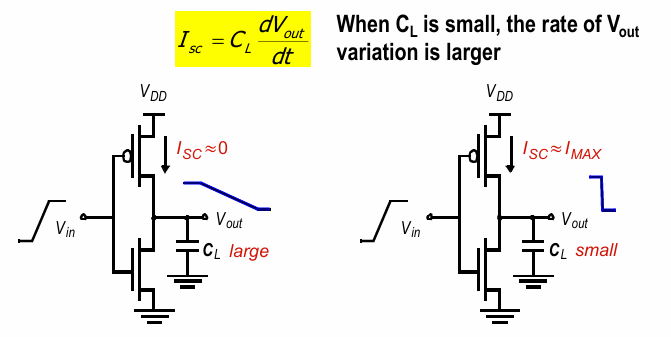
负载电容的大小会影响峰值电流的大小,具体来说,负载电容越小,峰值电流越大:
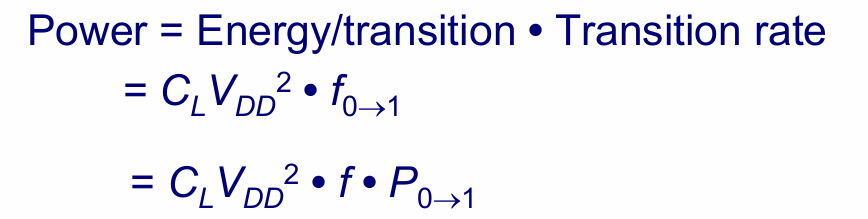
对于动态功耗的计算,每次从低到高翻转消耗的能量为:
$$E = C_LV_{dd}^2$$
其中$\frac{1}{2} C_LV_{dd}^2$的能量用于电容的充电,另外一半被PMOS或转化为热量,在放电时,另一半存储在电容的能量被NMOS转换为热量(这也是芯片放热的主要来源)。并且这个值与晶体管的尺寸无关,而只与负载电容和工作电压有关。
如果考虑电路的从0到1的翻转频率,则有:
$$P_{dyn} = C_LV^2_{DD}f_{0\rightarrow1}$$
针对最小功耗的反相器链sizing
上一节针对反相器链的性能进行了sizing,事实上,还可以针对最小功耗进行sizing。
(待补充)
PDP和EDP
如第一节中所定义的,反相器的PDP和EDP如下:
当需要平衡功耗与性能,使反相器的EDP最小时,我们假设书中的公式5.21:
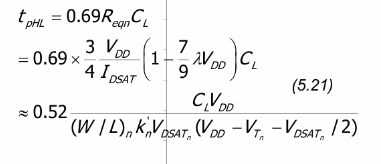
其中阈值电压和饱和电压满足一定的比例关系,可得:
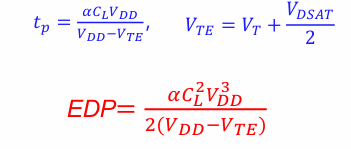
另上述EDP对VDD的偏导为0,得:
对于一般的亚微米工艺,$\alpha$在1到2之间。
Lecture4 Combinational Circuits
本章将介绍组合逻辑电路,分为以下几个方面:
- 静态/动态CMOS 逻辑
- 组合逻辑门
- 不同输入下的门延迟
- 快速逻辑门设计
- 逻辑努力与延迟优化
- 有比逻辑
- 传输管逻辑
- 动态逻辑
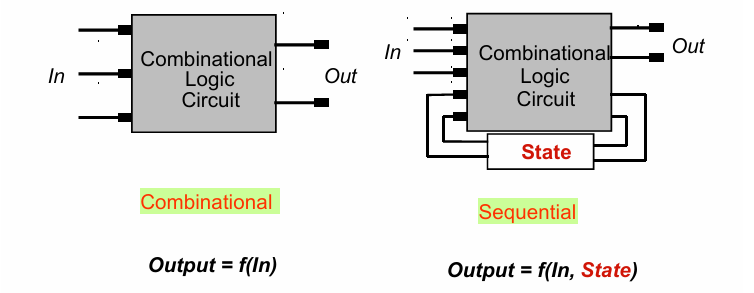
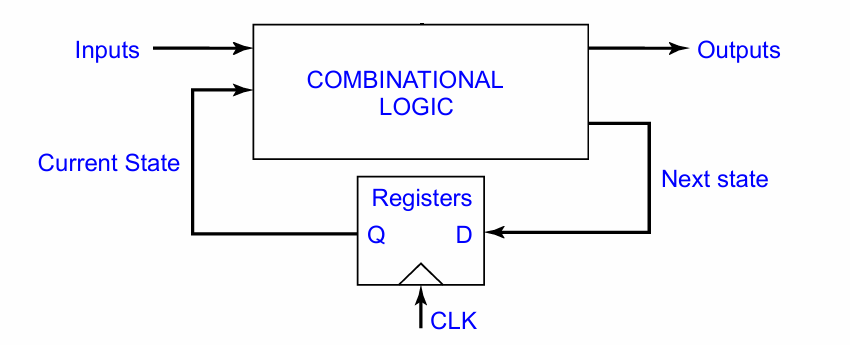
所谓组合逻辑,自然是与时序逻辑向对比而言的。二者的区别从抽象的角度来说,组合逻辑是输入的函数,而时序逻辑既是输入的函数,也是当前状态的函数。
静态/动态CMOS电路
静态CMOS电路直接与电源和地相连,当电路稳定后,输出与时间无关。
动态CMOS电路则需要时钟信号控制。
组合CMOS逻辑门
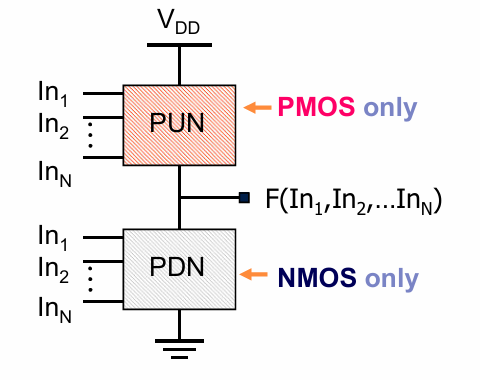
CMOS逻辑门分为上拉和下拉网络,并且上拉网络的拓扑结构与下拉网络的结构是对偶的。上拉网络完全由PMOS组成,下拉网络完全由NMOS组成。并且这样实现的逻辑总是PDN的非逻辑。
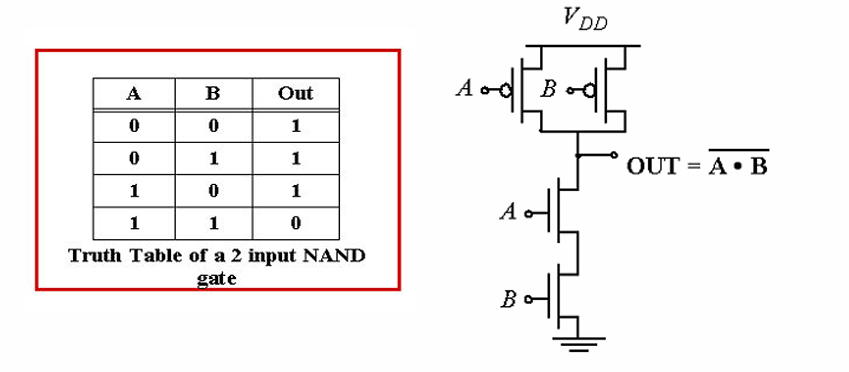
一个典型的例子是NAND门:
CMOS逻辑的优点在于:
逻辑摆幅大:CMOS集成电路的逻辑高电平“1”、逻辑低电平“0”分别接近于电源高电位VDD及电源低电位VSS,因此具有较高的噪声容限。也就是说,逻辑值的电平与管子尺寸无关。
具有低功耗特性:CMOS逻辑电路在静态状态下几乎没有功耗,只有在开关转换时才消耗功率。
可以通过sizing调节上升和下降的传输延迟
不同输入pattern下的传输延迟
CMOS组合逻辑仍然可以套用之前的RC模型:
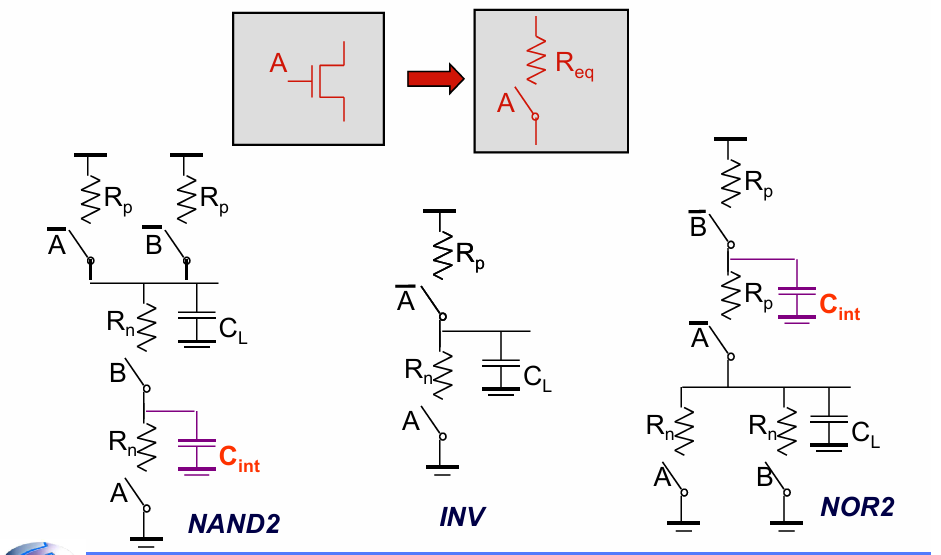
与反相器不同的是,不同的输入组合会使传输延迟有所不同。例如考虑一个NAND门:
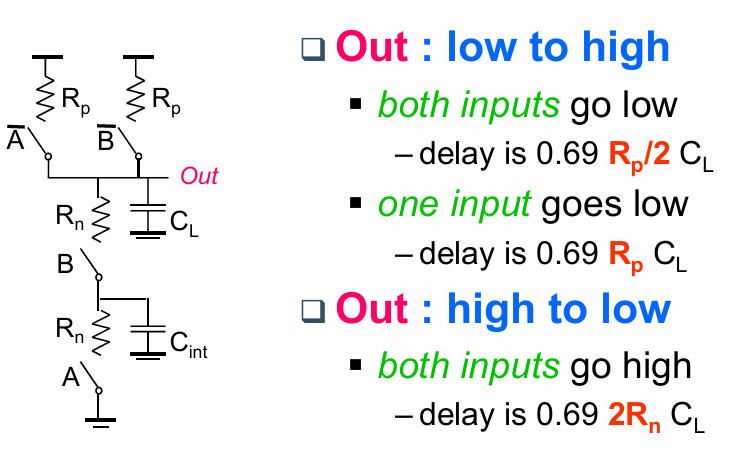
当输入AB同时拉低时,通过2条并行的线路同时对负载电容充电,从而传输延迟相比只有一条通路时有所下降。
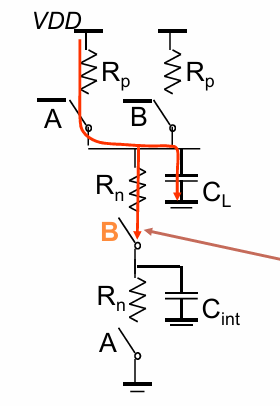
还有一种最坏的情况为: B保持为1,A由1变为0,这个过程中,不但要通过A所在通路向负载电容充电,同时也需要对中间节点的电容充电:
逻辑门的sizing
之前的章节我们分析过,对于晶体管,其尺寸(主要是宽度W)每扩大S倍,其等效电阻降低为原来的1/S。
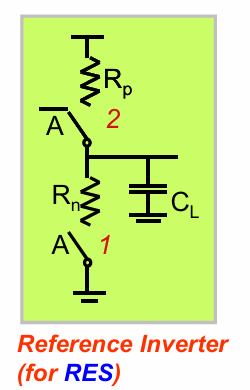
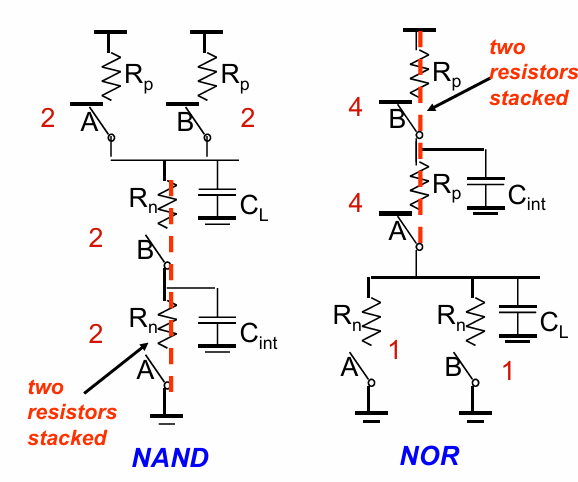
对逻辑门sizing的初衷在于,想要使上拉和下拉的传输延迟与一个标准的CMOS反相器(PMOS尺寸为NMOS的2倍)相同。而对一个逻辑门,总是考虑其最坏情况下的传输延迟。
因此sizing的逻辑在于将串联的管子尺寸翻倍,以使其等效电阻与单个单倍尺寸的管子相同
sizing过后的NAND和NOR门分别如下:
对扇入的考量
当逻辑门的输入增多时,逻辑门的扇入也会影响逻辑门的性能,需要被纳入考虑。比如如下图所示的4输入NAND门:
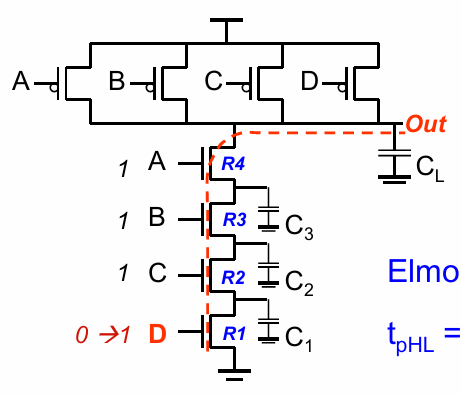
当ABC均为1,D从0变为1时,由于一开始OUT为高电平,$C_L$和内部节点$C_1,C_2,C_3$均被充电。
在放电过程中,电路的延迟可被计算为:
$$t_{pHL} = 0.69(C_L(R_1+R_2+R_3+R_4)+ C_3(R_1+R_2+R_3)+C_2(R_1+R_2)+C_1R_1)$$
当N管尺寸相同时,可以认为它们拥有相同等效电阻,于是延迟转化为:

也就是说,逻辑门的延迟和扇入的数量成平方关系。因此大扇入对门的性能影响很大。
相比之下,扇出对延迟的影响是线性的。
快速逻辑门设计
基于上述对fin-in的考察,对于一个同样功能的逻辑门,有以下不同方式可以降低其延迟:
递进式sizing
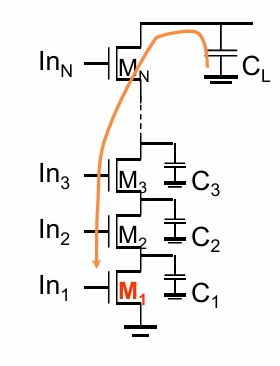
对于类似的串联结构,由于M1管的电阻对整体延迟贡献的最多,因此可以将其尺寸适当放大以减小电阻。同样我们可以逐级放大后续管子的尺寸,使得:

这样的sizing方式可以降低大约20%延迟。
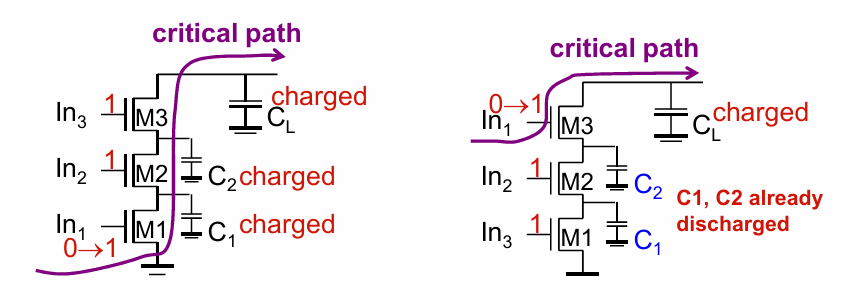
晶体管的重排
通过重排,将先翻转的逻辑门从近输出端移到近地端,让内部电容提前放电,可以有效降低延迟:
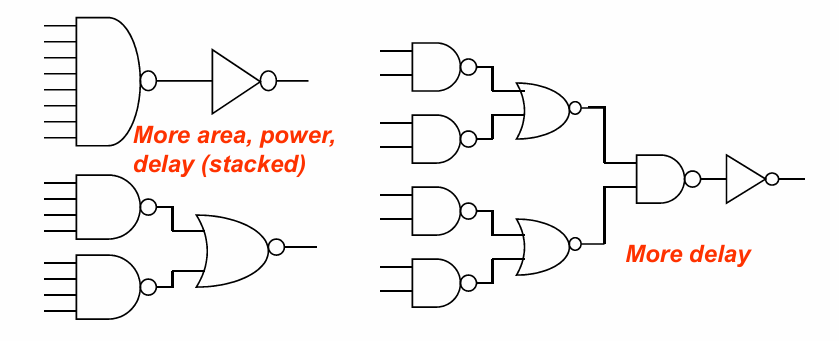
逻辑重构
对于同一逻辑,使用不同的门进行组合可以降低其延迟。
例如对一个8输入与门有以下几种不同的实现方式:
插入buffer增强驱动

这样做能够增强驱动的原理在于,buffer的加入将fan-in和fan-out进行了隔离。
逻辑努力
先前对反相器链的分析中,我们知道通过对一整个链上的反相器进行sizing,可以有效降低整个路径的传输延迟。通过引入逻辑努力,可以将上述分析方法推广到所有组合逻辑门。
首先回顾反相器链的知识,一个标准反相器的延迟可以被表示为:
$$t_p = 1+\frac{f}{\gamma}$$
其中f为等效扇出,$\gamma$是工艺参数,代表本征电容和栅电容的比值。
$$C_{inv} =\gamma C_{g}$$
将上述分析方式推广任意逻辑门:
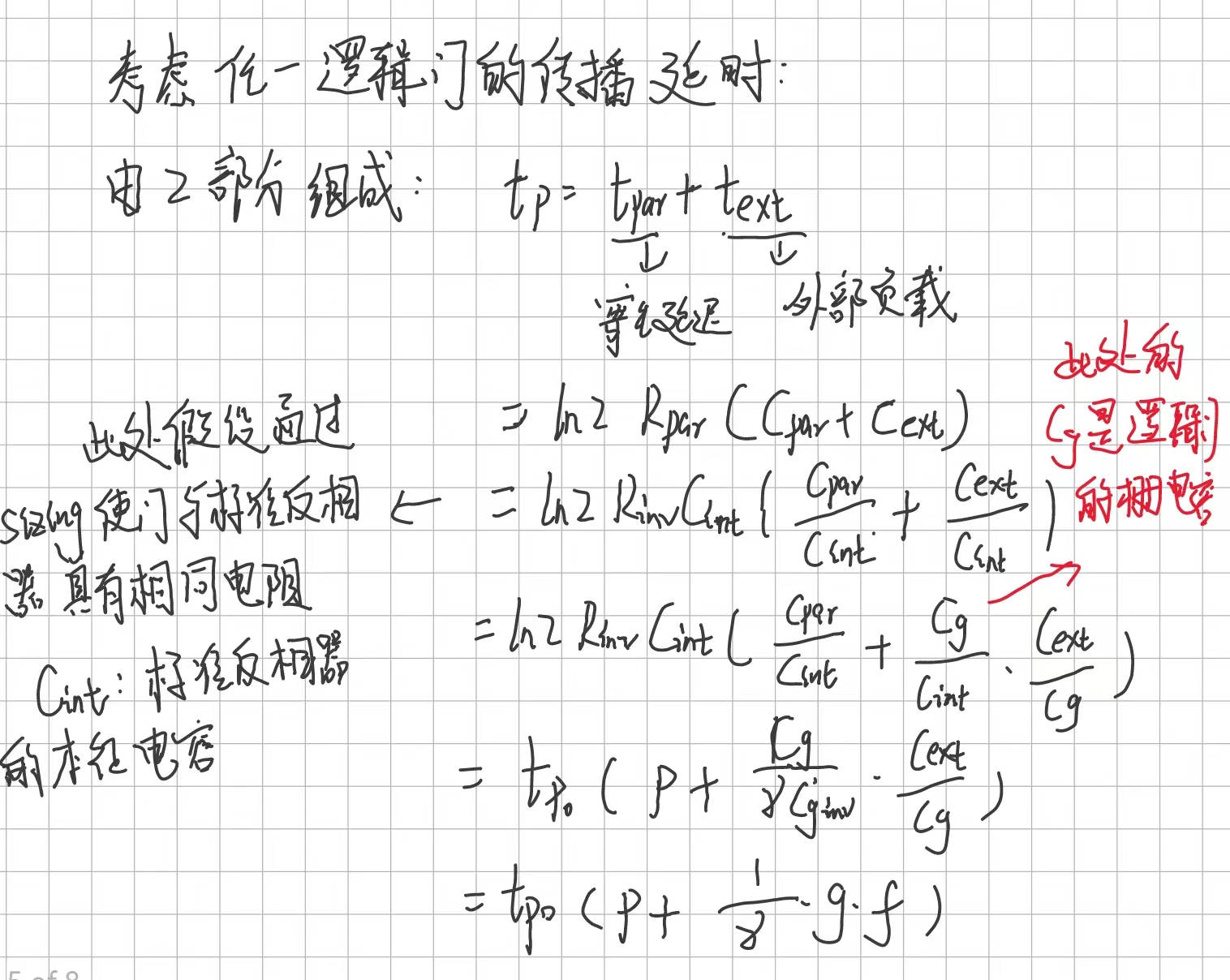
注意上述推导过程,在第三行中,提取一个标准反相器的本征电容$C_{int}$作为公因子,在第五行中将这个值代换成了标准反相器的栅电容$\gamma C_{ginv}$。同时,假设通过sizing使标准逻辑门拥有与反相器相同的电阻,从而$R_{par} = R_{inv}$。
第四行的$C_g$是逻辑门的栅电容。
最终我们得到公式:
$$t_p = t_{p0}(p+ \frac{g\cdot f}{\gamma})$$
其中:
- $p$是逻辑门本征电容和标准反相器本征电容只比,这个值只与逻辑门的类型和拓扑结构有关。
例如,对一个n输入的nand门,其p值为n:
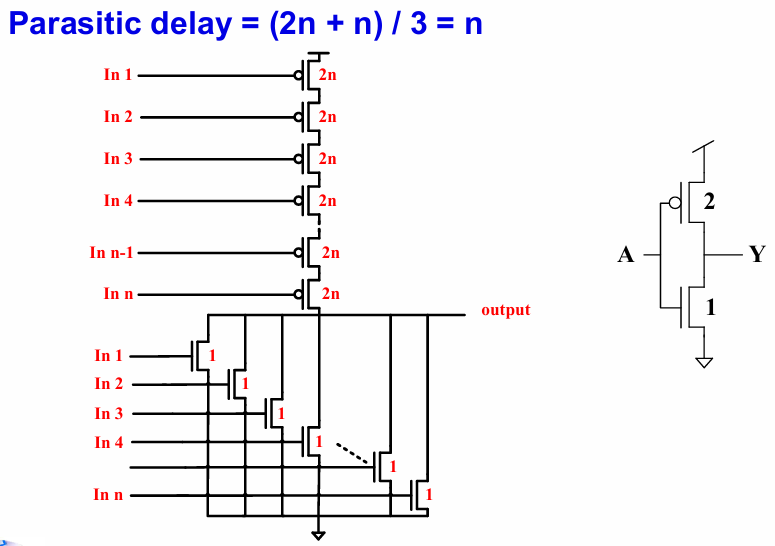
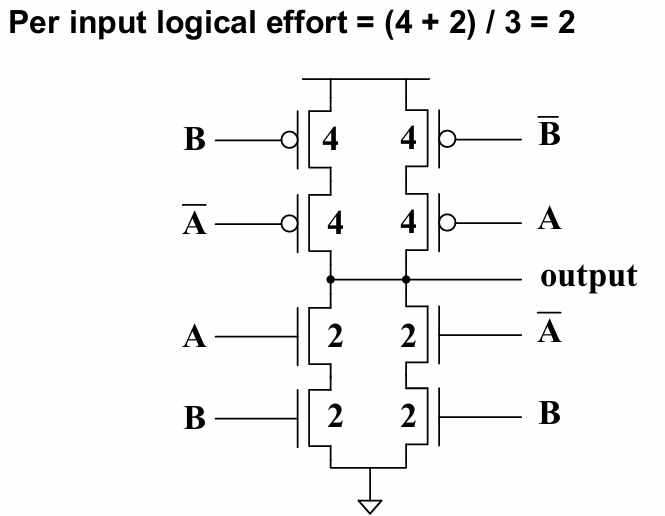
而对于下面的异或门,其p值为4:
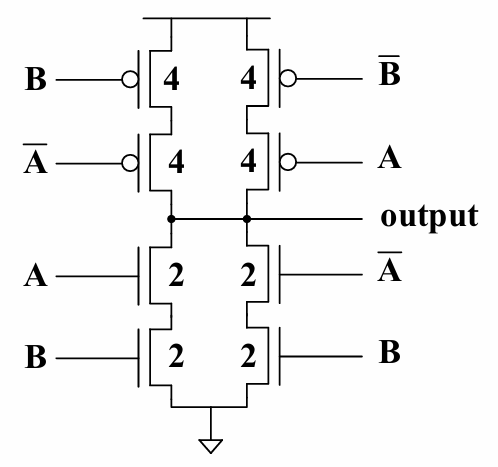
(计算方法是看其对输出节点贡献的负载电阻。)
不同逻辑门的p值总结如下: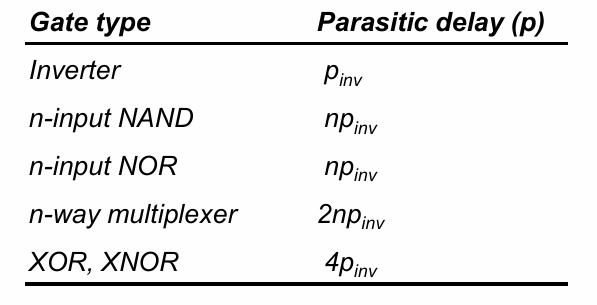
$g$称为逻辑努力,是门输入栅电容与标准反相器栅电容的比值,与逻辑门的类型有关。下表总结了不同类型的逻辑门的逻辑努力:
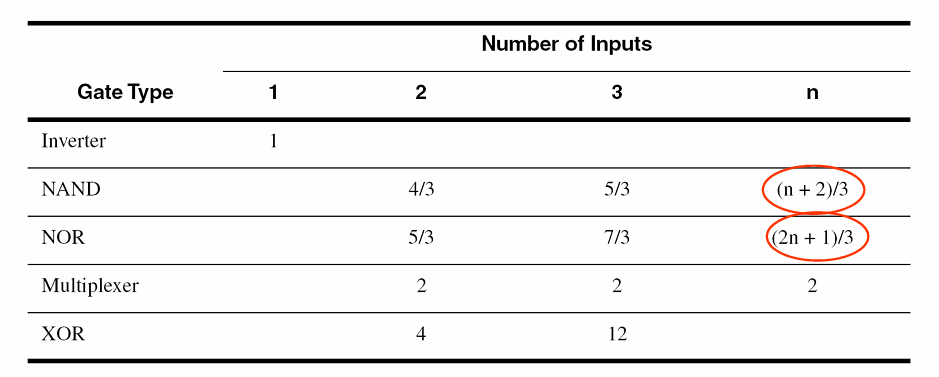
$f$为等效扇出,与反相器链中定义的一致,只不过这里的扇入是逻辑门的栅电容。
非对称逻辑门 skewed gates
(待补充)
分支努力
假设同一个逻辑门的扇出路径上存在多个相同的逻辑门,如下图所示:
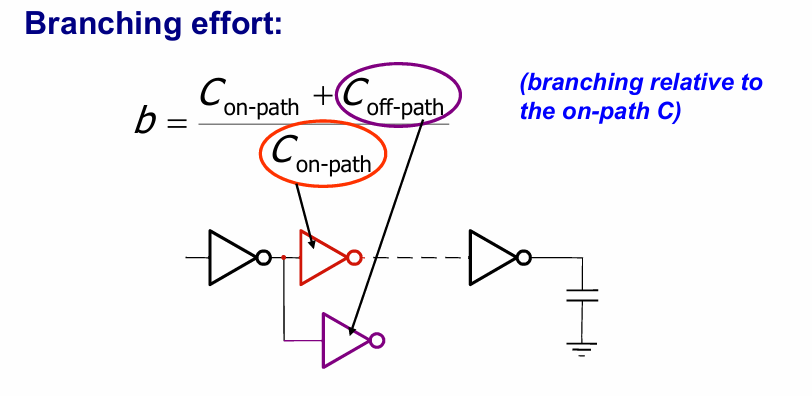
假设逻辑门共有b个分支,则对于单个逻辑门,其外部负载变为原来的b倍,传输延迟变为:
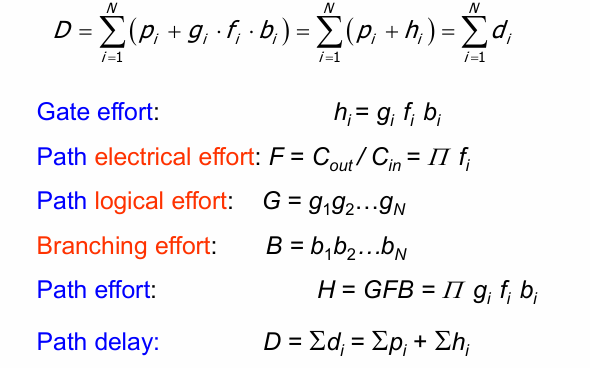
$$t_p = t_{p0}(p+ \frac{g\cdot f\cdot b}{\gamma})$$
考虑一个多级,多分支的路径,其总延迟为:

优化上述延迟,使总延迟最小: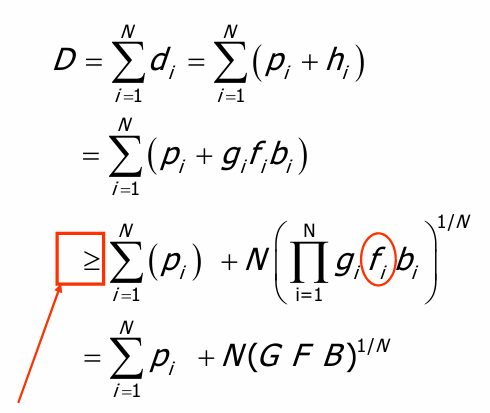
当且仅当每一级的
$$h_i = g_if_ib_i$$
都相等时,整个链路的延迟最小。
而对于每一级来说,逻辑努力g和分支努力d都是固定的,能够进行sizing的参数只有f。
当电路的级数固定时,令每一级的级努力h都相等,可以取得最低延迟。
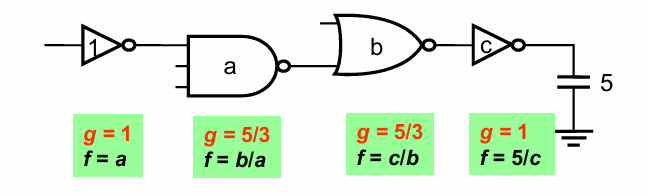
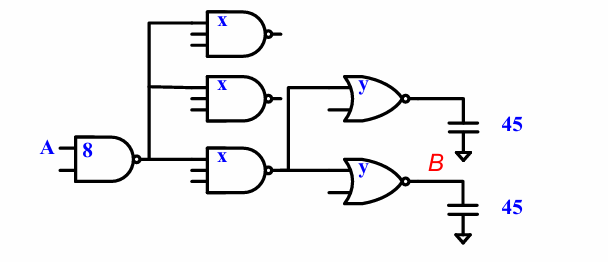
example
例:优化下面电路的延迟:
总结
Ratioed Logic 有比逻辑
除CMOS逻辑外,对同一电路功能还有其他实现方法,比如有比逻辑。
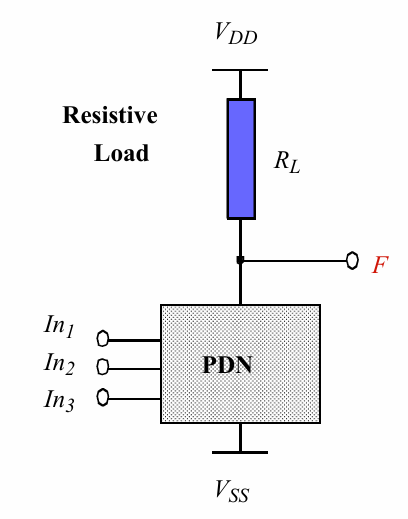
有比逻辑将CMOS中的上拉网络用一个电阻负载进行替代,可以有效减小电路的面积。有比逻辑具有以下特点:
- n输入的逻辑由n个管子和一个负载组成
- $V_{OH} = V_{DD}$
- $V_{OL}=\frac{R_{PN}}{R_{PN}+R_{L}}V_{DD}$
- 具有非对称的响应时间
- 静态功耗很高
- $t_{pLH}=0.69R_LC_L$
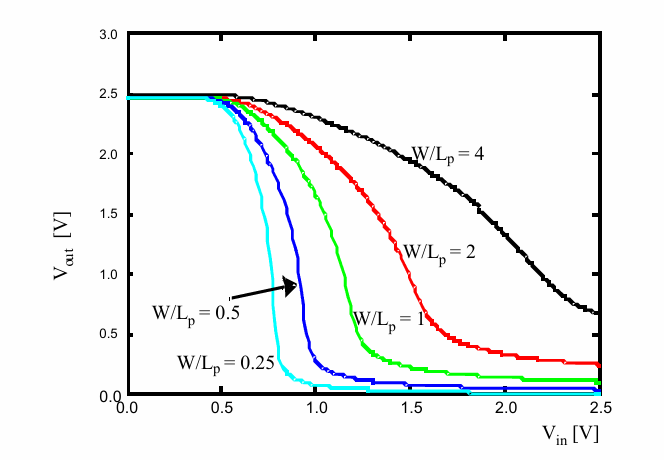
伪nmos逻辑
上述有比逻辑在实际实现时,可以通过一个敞开的PMOS来代替电阻:
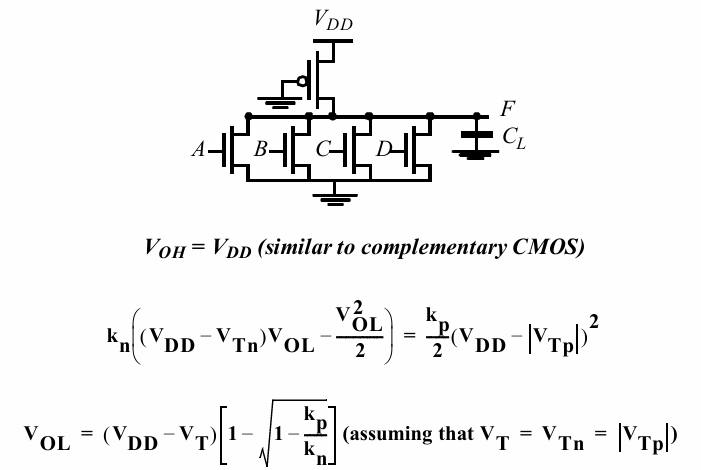
这样实现的问题是$V_{OL}$不为0,且与P管与N管的尺寸比例有关(所以叫有比逻辑)。当P管的驱动能力太强时,下拉的N管可能不足以将电路拉低:
有比逻辑的优化
基于有比逻辑的缺点,可以对其进行一些改进
改进负载
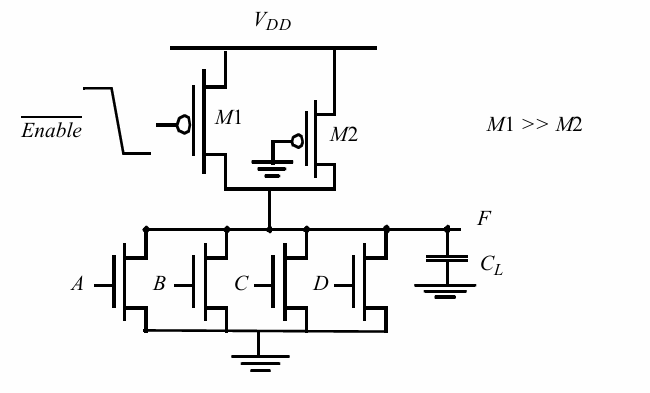
添加一个enable负载,增强P管驱动
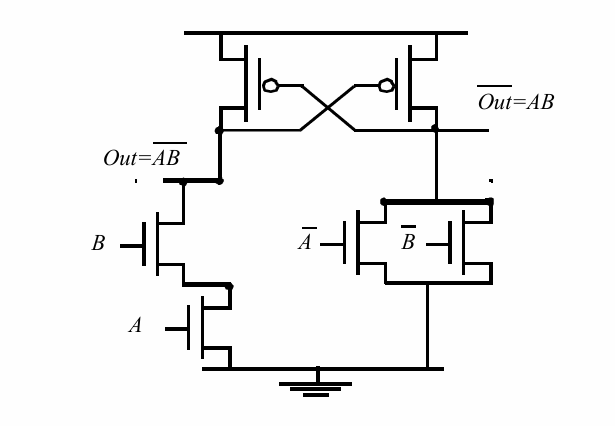
差分级联电压开关逻辑 Differential Cascode Voltage Switch Logic (DCVSL)
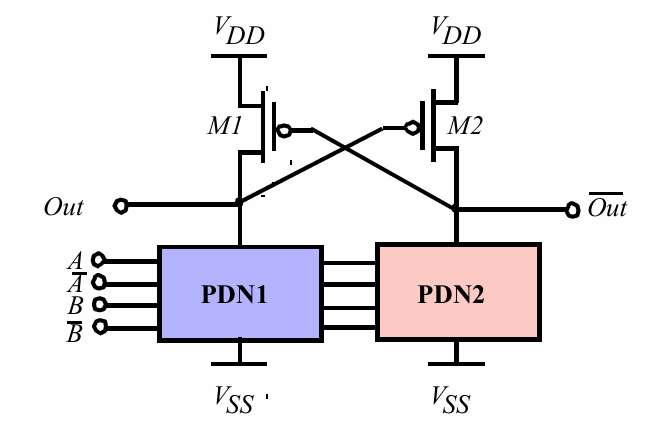
将2个下拉网络的输出端进行级联,并且下拉网络彼此对偶。当一个电路打开时,另一个一定关断。 例如下面的 与门:
差分逻辑具有如下特点:
- 全电压摆幅。($V_{OL}$=0,因为out为0会反馈回来关掉上拉网络)。
- 无静态功耗
- 2个互补的输出直接没有延迟
传输管逻辑
在一般的晶体管电路中,输入都被送到晶体管的栅极,而在传输管逻辑中,输入被送到晶体管的源/漏极,这样的好处是可以在功耗,面积或性能上得到提升。
nmos开关
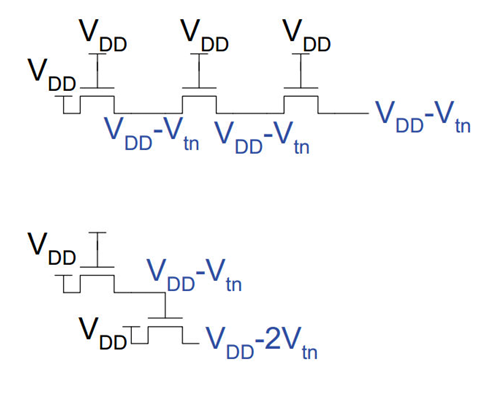
当nmos作为开关时,存在的问题在于不会获得全摆幅的电压输出,如下图:
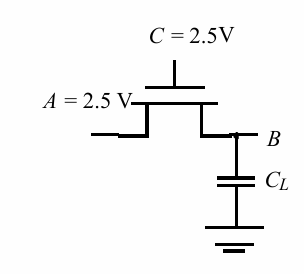
分析B点的电压,由于晶体管必须保持开启状态,有:
$$V_{GS}=V_C-V_B \geq V_t$$
B点的电压最多只能达到 $V_{DD}-V_T$
这为传输管逻辑的级联带来了问题:
如图: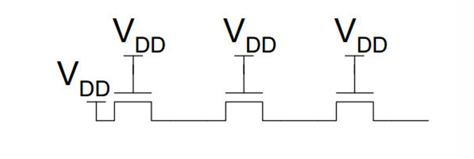
这样的连接方法在末端会损失一个$V_t$的电压。
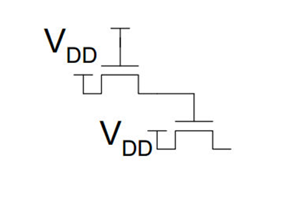
这样的连法没连接一次就会损失一个$V_t$的电压。
改进:level restoring
可以通过下面的方式改进输出不足的问题:
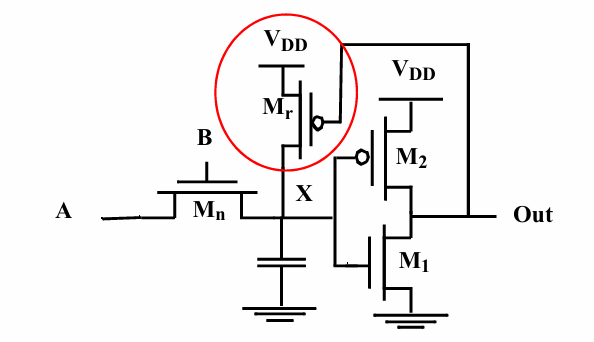
通过一个反馈的P管,将X点电压重新拉回VDD。问题在于,这样的电路是一个有比逻辑,$M_r$的尺寸不能太大,否则X点电压可能没办法被拉回0.
传输门逻辑
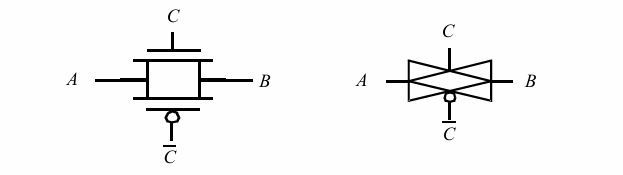
通过同时使用PN2个管子,得到一个全摆幅的输出
延迟分析
一个打开的传输门可以看作一个电阻,多级的传输门逻辑相当于一个RC网络,其延迟是级数的二阶函数:
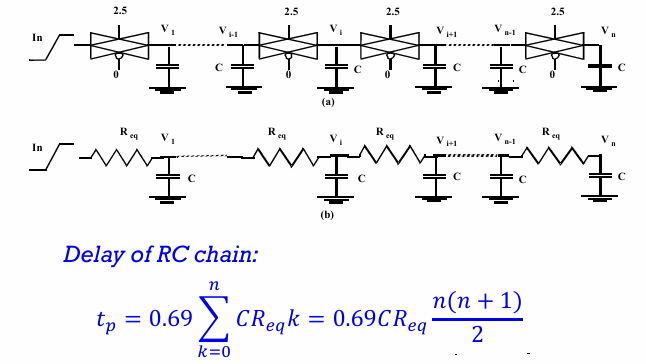
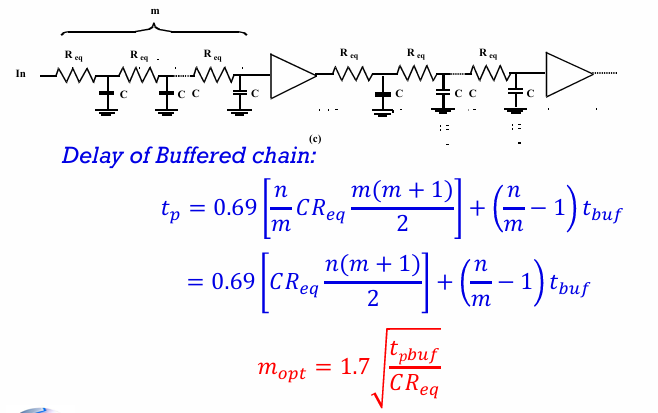
同样可以通过插入buffer的方式来降低延迟:
动态逻辑
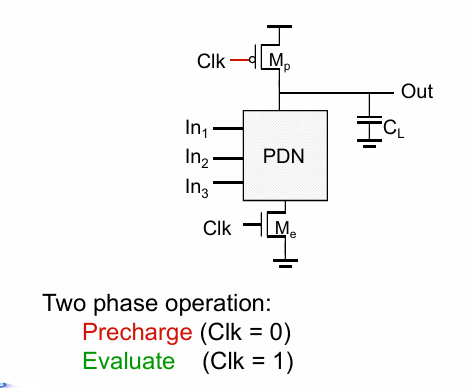
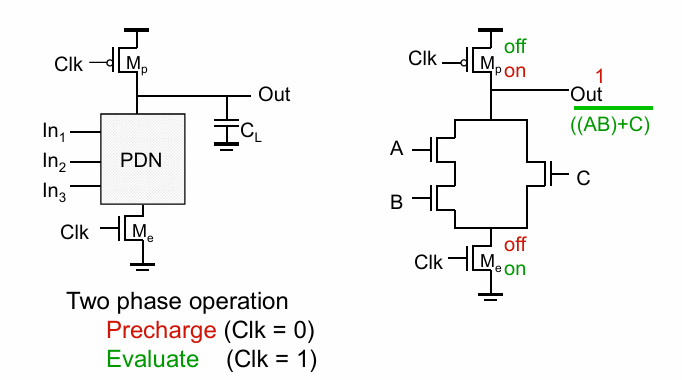
动态逻辑的电路结构如图,通过为PDN加上2个由clk信号控制的管子和一个下拉网络实现,一个n输入的逻辑门需要n+2个管子实现。
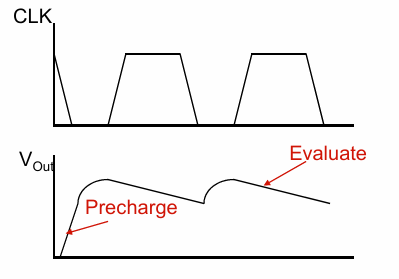
当clk为0时,最下方的n管关闭,上方的n管先对负载进行预充电。clk拉高后,充电结束,下方的n管打开,经PDN的计算决定要不要对负载进行放电。
动态逻辑具有如下优点:
- 只用下拉网络进行计算(节约面积)
- 全摆幅输出
- 无比逻辑
- 翻转速度更快(相比CMOS,输入和输出负载都更小)
动态逻辑的缺点在于:
- 功耗一般高于CMOS逻辑。(每次预充电后计算,都可能放电,导致电路的翻转频率高于CMOS)
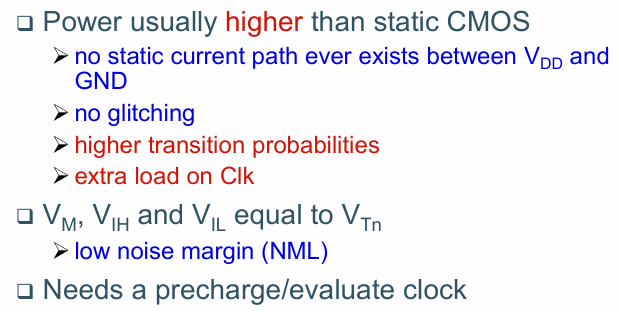
噪声容限较低。
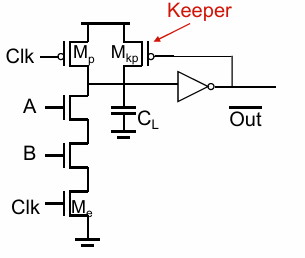
漏电问题
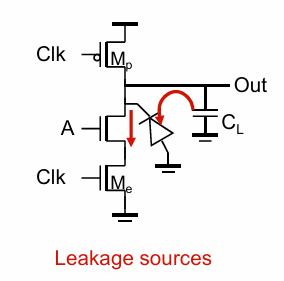
如下图,预充电后,A管的源极电压为高,S和B直接存在一个反偏的PN结,存在漏电流。这会导致$C_L$上的电荷减少,当进行计算时,无法得到一个满”1”:
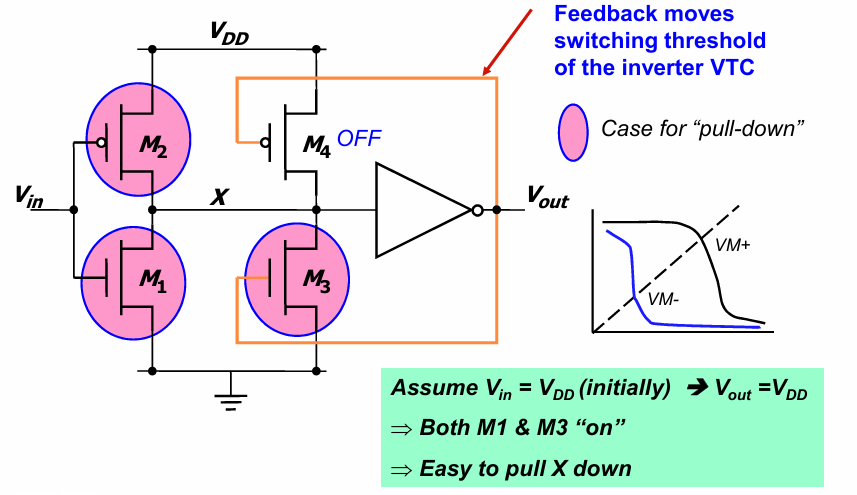
解决方案是通过一个反馈来进行电压维持:
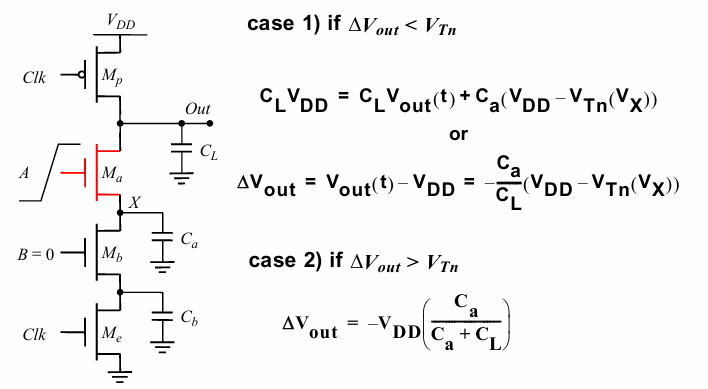
电荷共享问题
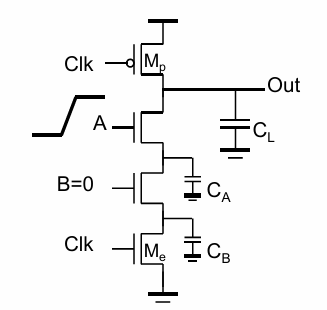
如果在clk为0,进行计算的时候,A由低变高,则$C_A$分担了$C_L$上的电荷,同样导致输出不能达到满”1”:
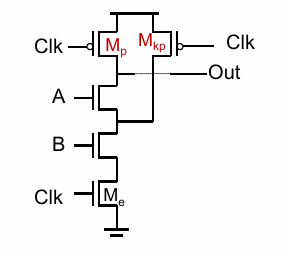
解决方案是使用clk控制的晶体管对中间节点进行充电:
回栅问题 (back gating)
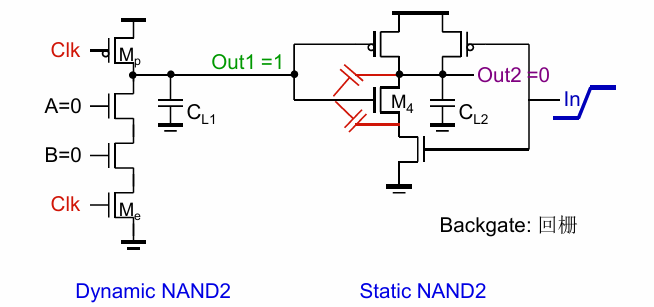
简单来说就是输入(out1)通过电容耦合到了输出(out2)上,使输出不能得到完全的计算。
时钟馈通 (clock feed through)
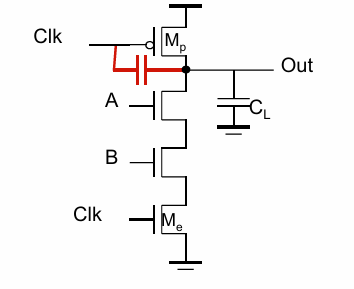
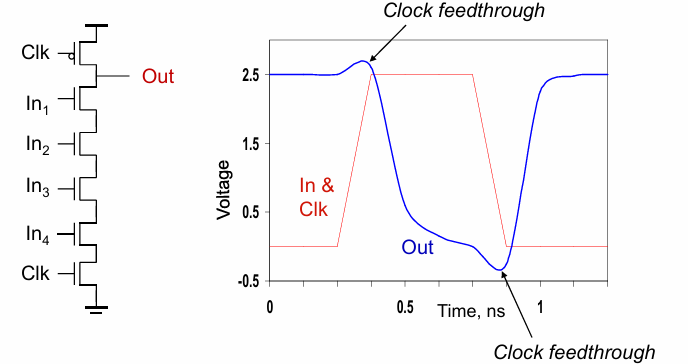
时钟信号的波动耦合到输出,使得输出峰值大于$V_{DD}$.
级联问题
如果将动态逻辑进行级联,同样会遇到输出下降的问题:
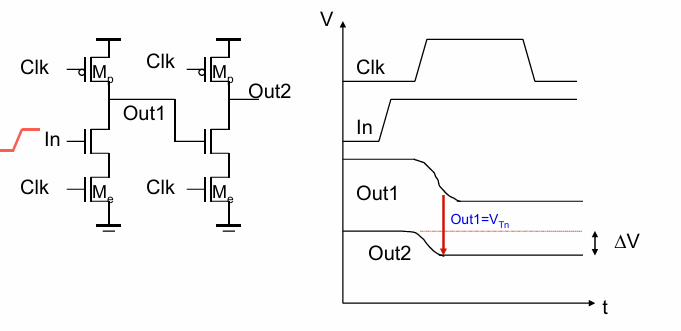
如图是2个串联的动态反相器,一开始clk为低时,out1和out2都被预充为1,在clk拉高后,它们分别开始计算。
由于in=1,因此out1的预期结果应该为0,而out2的结果应该为1.在计算过程中,out1节点会逐渐放电到0,由于out1降到0需要一定时间,在这器件out1控制的nmos仍然是打开的,因此out2也会通过下拉通路放电,知道out1的值降到vt以下才会结束这个过程。
通过上述分析我们可以发现,这种过程只出现在计算时不需要放电,但却因为输入是从1到0渐变的,导致了一部分电荷损失。如果输入是由0到1的,也就是说本来就需要对输出节点进行放电,则不存在这个问题。
因此可以通过增加一级反相器解决这个问题: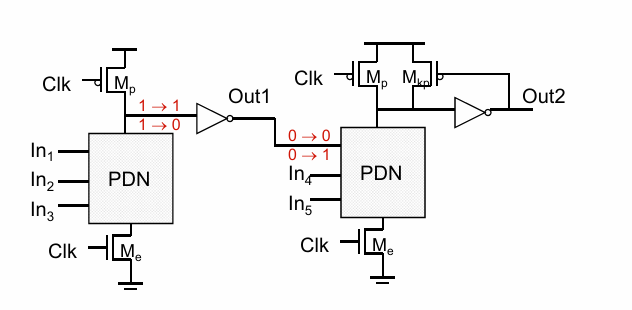
由于out1前面的节点总是被预充到1,out1自己总是被预放电到0,如果计算出out1=1,再对后面的节点进行放电,就不会有问题。
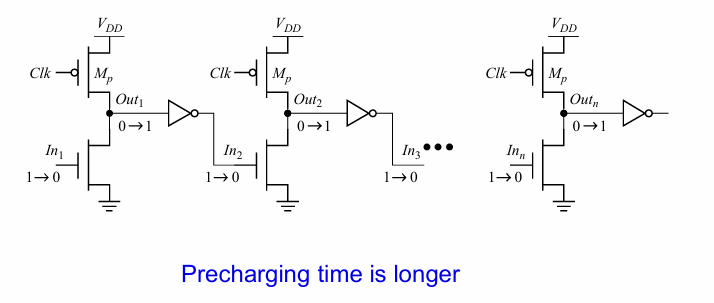
这样的多个动态逻辑的串联被称为多米诺逻辑:
此外可以在多米诺逻辑的基础上省略下面的管设计出footless的多米诺:
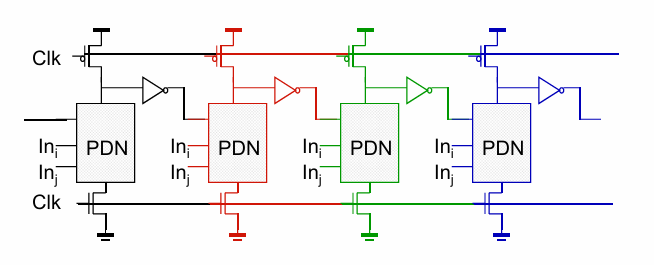
以及省略中间的反相器,做成np-CMOS: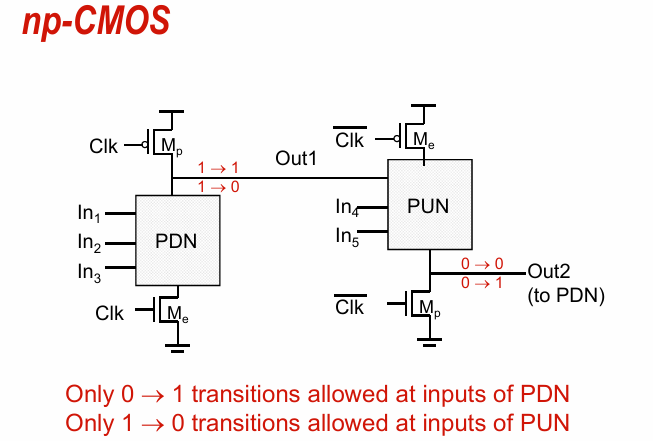
Lecture5 时序逻辑
时序逻辑与组合逻辑的最大区别在于,电路的输出不止由输入决定,也由电路当前的状态决定。
锁存器(latch)和寄存器(register)
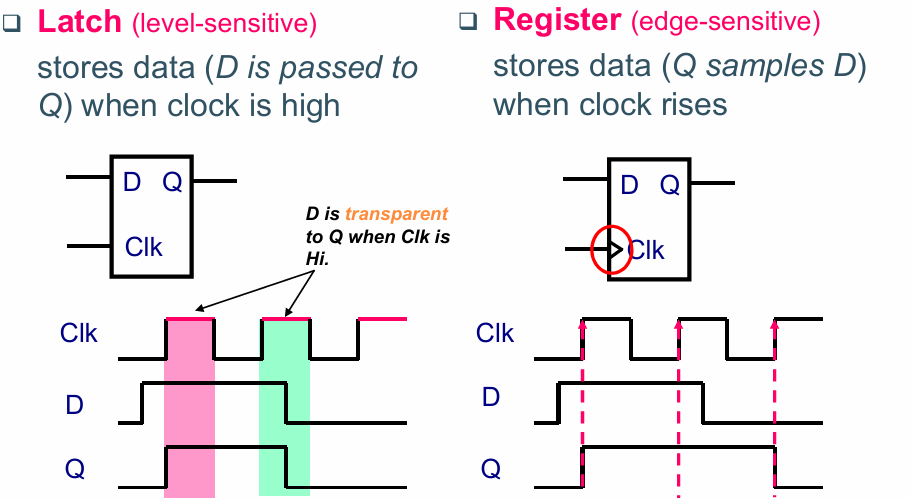
区别在于,latch在整个时钟拉高的阶段都进行计算,register只在时钟上升沿发生变化。
时序参数
对寄存器来说,有以下几个重要的时序参数:
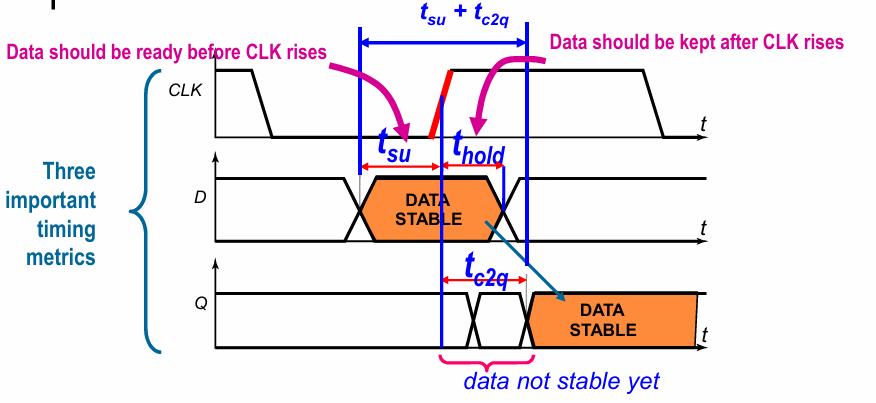
- set up time: 时钟到来之前,数据需要提前准备好的时间
- hold time: 时钟到来之后,数据需要保持不变的时间
- $t_{c2q}$:顾名思义,指时钟开始发生变化,到数据完成计算保持稳定的时间。可以看作是clk到q的传播延迟。
接下来定义如下参数:
传播延迟
污染延迟指输入信号开始变化后,输出信号完成变化的时间。也就是说,在传播延迟之后,数据才运算结束。
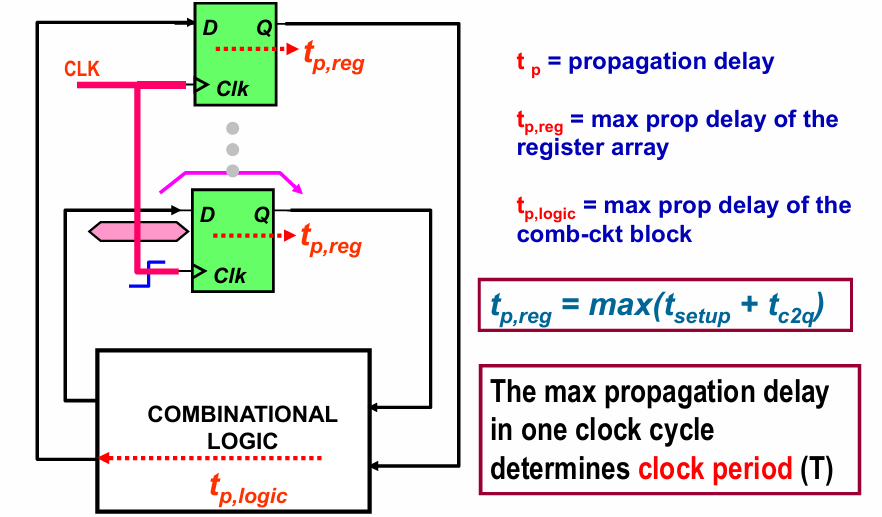
在这里要注意的是,传输延迟和数据端D无关,而是与时钟信号clk有关。
而$t_{p,reg}$不止需要经过寄存器的c to q传播,还需要数据提前准备好,所以要加上set up time。在传输延迟之后,数据不会有新的变化(一周期之内)
传播延迟决定时钟周期。
污染延迟
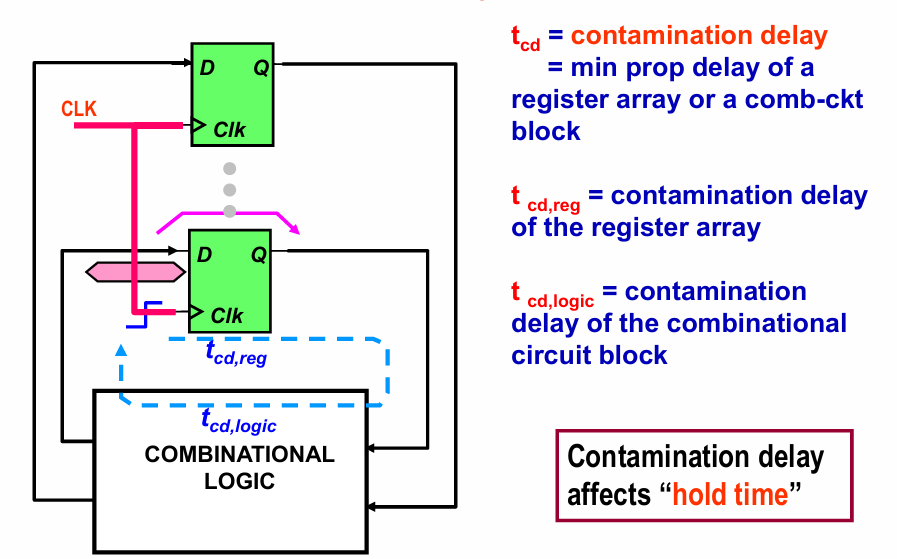
污染延迟指输入信号开始变化后,输出信号开始变化的时间。也就是说,在污染延迟之内,数据未发生任何变化。因此污染延迟被用来计算保持时间。
建立时间
对于一个流水线结构,时钟周期满足如下关系:

保持时间
对于一个有限状态系统,保持时间满足如下关系:
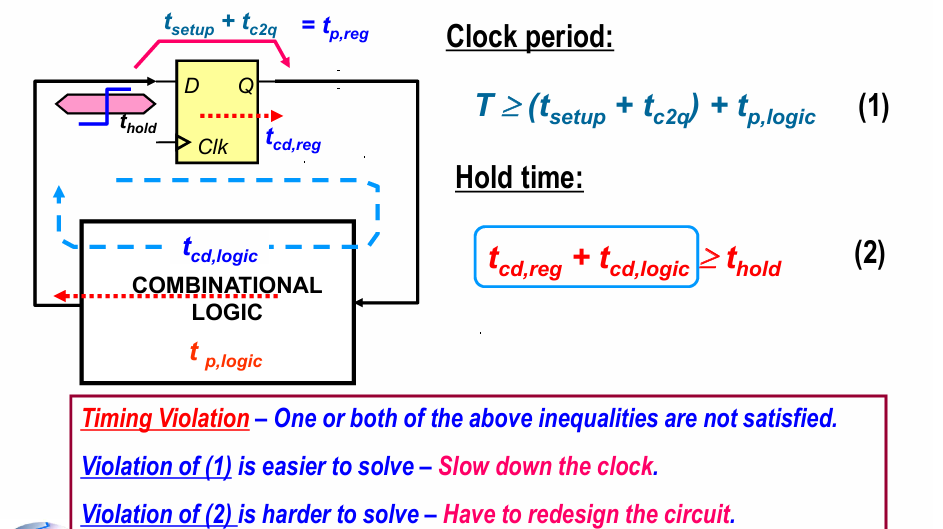
如果电路不满足建立时间,可以适当降频增大时钟周期,如果电路不满足保持时间,需要重新设计电路(例如可以通过插入buffer)的方式解决。
静态latch 和 register
如果需要用电路存储01这两种不同的状态,需要电路在高低电平时均能保持稳定,这需要构造一个双稳态电路。最简单的双稳态电路如下:
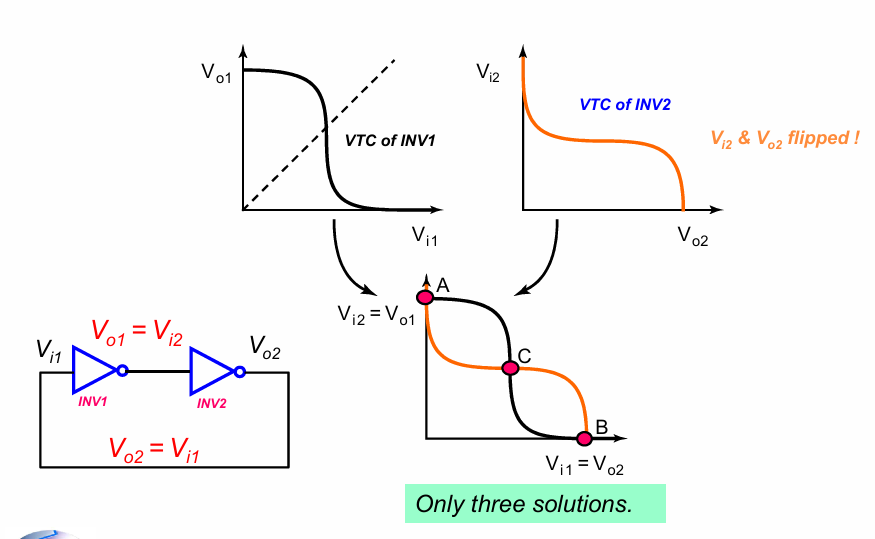
双稳态的蝶形曲线,可以保证任何向两端便宜的电压都会得到自我强化,最终达到一个稳定的端点:
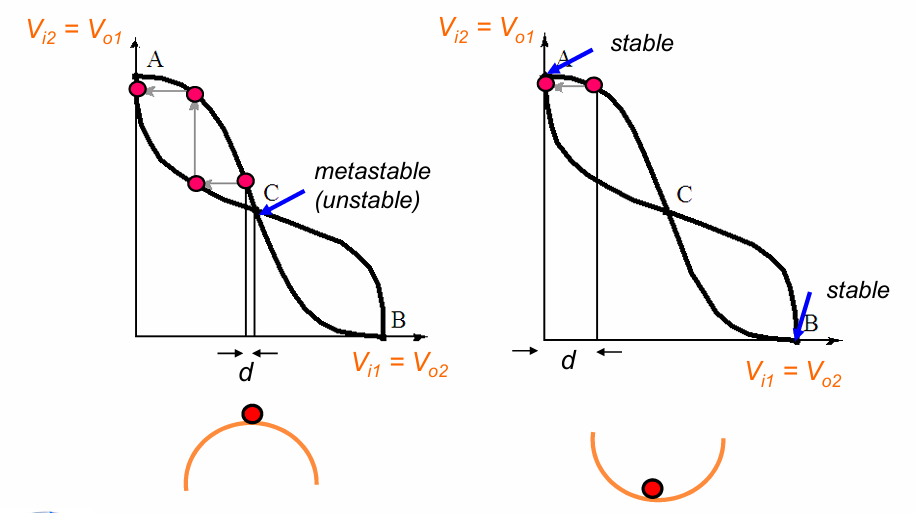
然而,注意到在电路的C端,同样是一个可能成立的点。如果电路停留在C点而没有任何外部绕的的话,则处于一种”亚稳态”。
数据的存储
使用晶体管存储电路一般有2种方式:
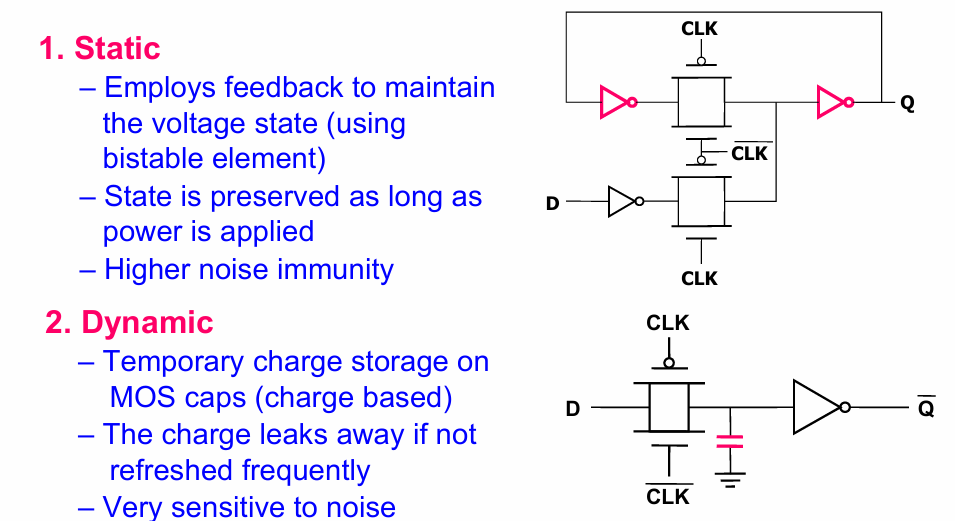
一种是通过双稳态电路静态存储,状态在通电状态下可以一直保存(类别SRAM)
一种是通过电容存储,需要定期刷新(参考DRAM)
数据的写入
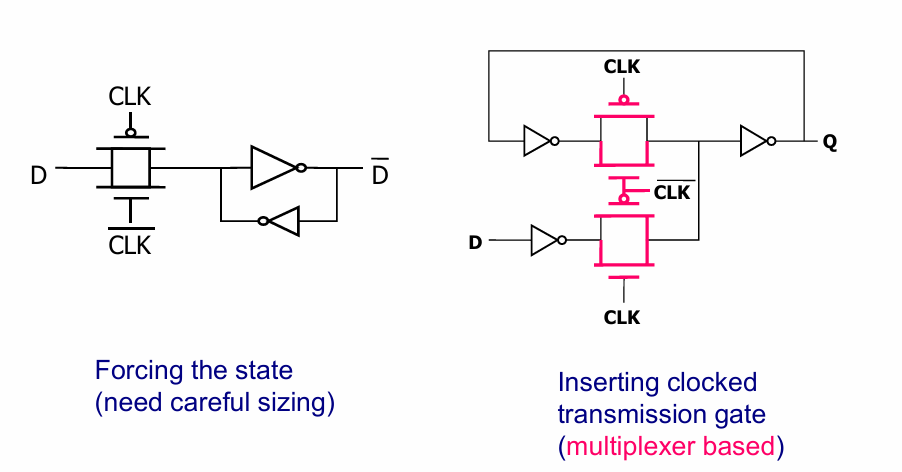
左边的写入方式是强行覆盖,需要晶体管有足够的驱动能力,需要sizing,右边的写入方式则相当于另外增加了写入通路。
latch的实现
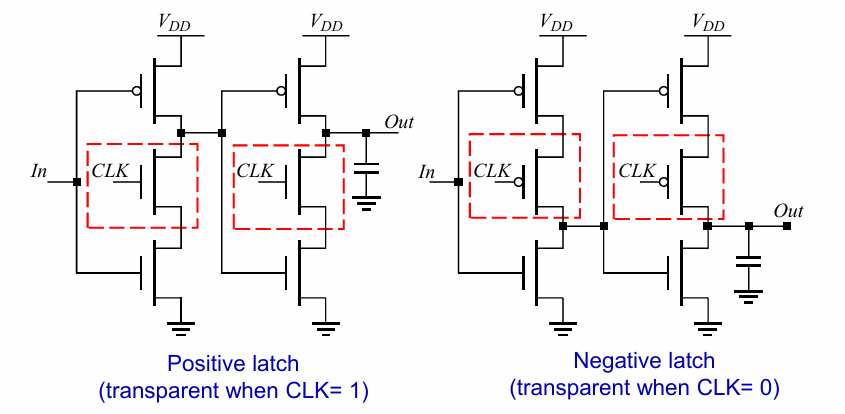
基于mux的实现方式
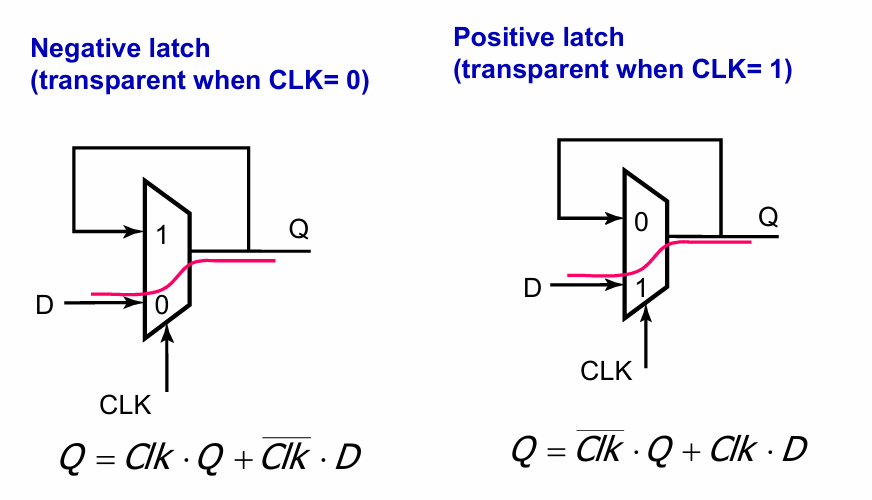
如图,通过反馈连接的Mux可以实现latch的功能
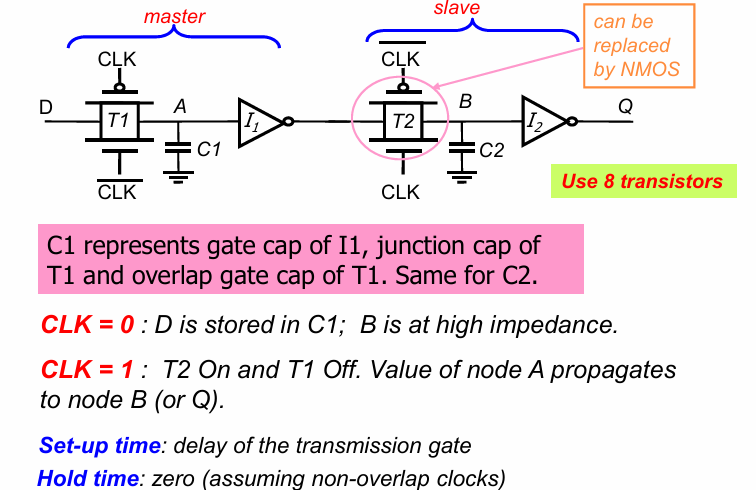
基于传输门的latch
这种实现下clk信号要驱动4个负载晶体管
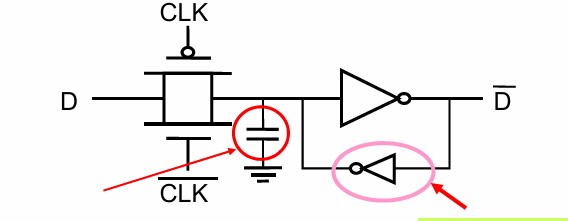
基于NMOS实现
这种实现需要clk和clk非信号之间直接没有重叠
静态register的实现
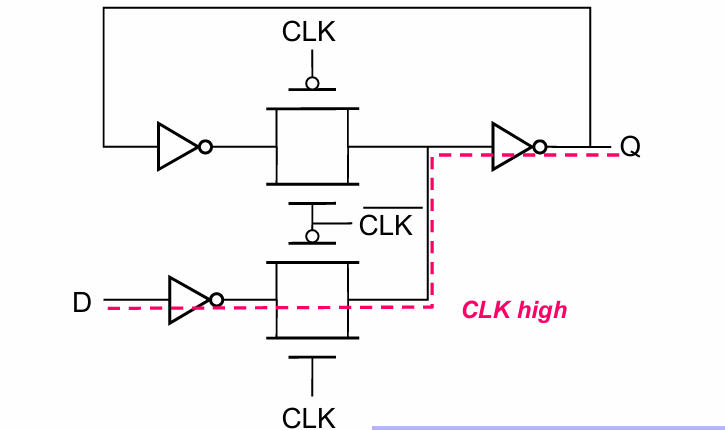
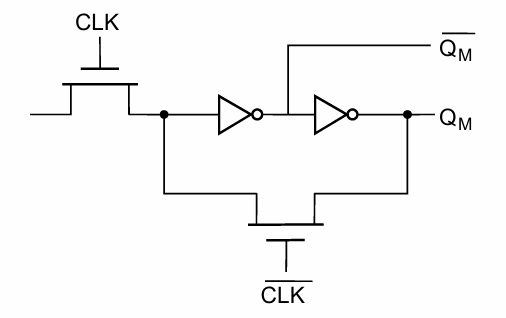
register可以通过将2级latch进行串联实现(可以用船闸进行类比)
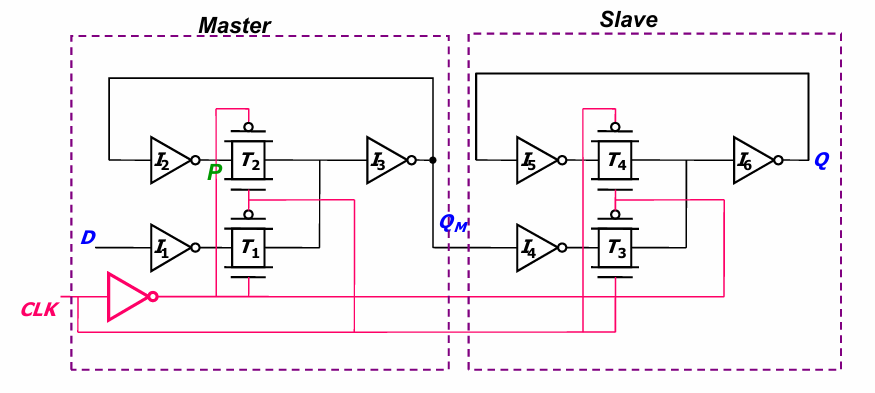
当clk为低时,数据被QM点采样,当clk为高时,QM保持不变并被Q采样。
此外,我们还可以对上述register做以下分析:
- clk信号的负载是6个晶体管
- 建立时间:
分析上述电路的建立时间:
时钟上升沿到来之前(clk=0),$T_1$打开,$T_2$关闭,信号D通过$I_1$,$T_1$,$I_3$,$I_2$(以及$I_4$)写入双稳态电路。如果不考虑分支造成影响,则建立时间为:
$$t_{setup} = 3t_{p_{inv}} + t_{p_{tx}}$$
即建立时间至少为3个反相器加一个传输管的传输延迟。
- 传输延迟
时钟上升沿到来后,$T_3$打开。Q端有输出,需要信号经过$T_3$,$I_6$,即:
$$t_{prop} = t_{p_{inv}} + t_{p_{tx}}$$
- 保持时间为0.这是因为一旦clk升高,$T_1$便关断,信号立即被阻断。
时钟交叠的问题
上述电路的问题在于,$\bar{clk}$信号是通过一个反相器产生的,而这导致原信号与非信号并不完全同步,会有时钟交叠的问题:
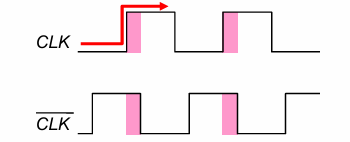
而当2个信号同时为高时,会存在从Q到D的直接通路,造成亚稳态。
可以通过2个不重叠的时钟解决上述问题:
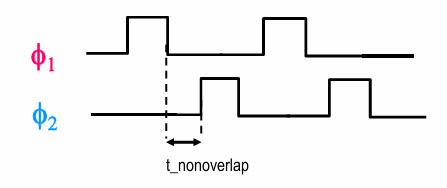
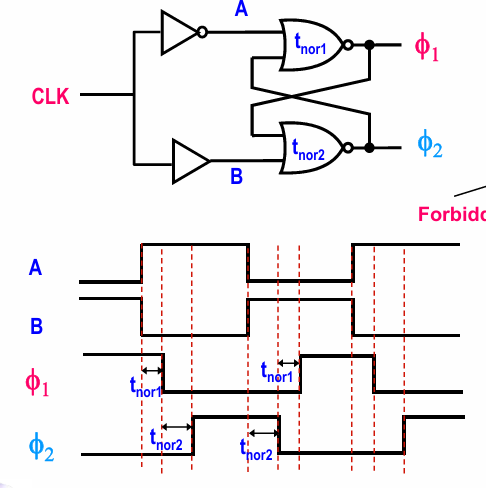
使用如下电路生成非交叠时钟信号:
动态latch和register
静态latch和register的缺点在于电路一般比较负责,同时面积过大。同时,对于依靠时钟驱动的电路,信号值一般只需要暂时保存(例如几个clk cycle),因此便有了动态存储的思想。
动态存储不使用双稳态电路中稳定的电平进行存储,而是使用电容中的电荷进行存储。
动态reg示例
如图,使用一个大电容对电荷进行存储,同样能达到register的效果。
同时,可以在每一级Latch中增加一个反馈回路,使得电容的电荷更加稳定:
当然,即使做了改进,由于耦合,漏电和vdd跳变的影响,该电路的稳定性还是不如静态register。
其他类型的reg/latch
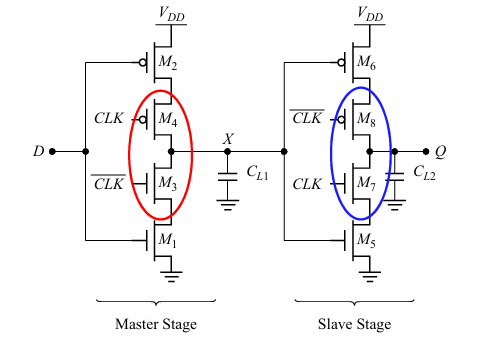
图中是一种C2MOS,当clk为低,$\bar{D}0$被写入X,当clk为高,X的非传到Q。
这种寄存器的好处是不存在时钟交叠问题,因为当clk和其非信号都为1或0时,D值无法传到X
单相register
上述寄存器的实现都同时用到了clk和其非信号,实际上还可以只用clk信号,从而避免时钟交叠问题。
如下所示:
为了将上述latch变成register,首先将其拆分成2半:
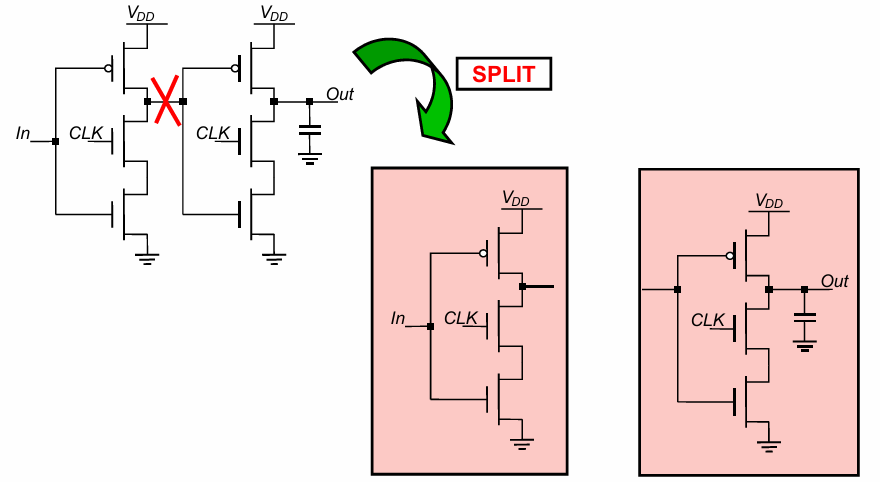
之后,我们加入一个动态逻辑中的inverter:
再将上述三部分合在一起,加上一个额外的反相器,即可构成一个register: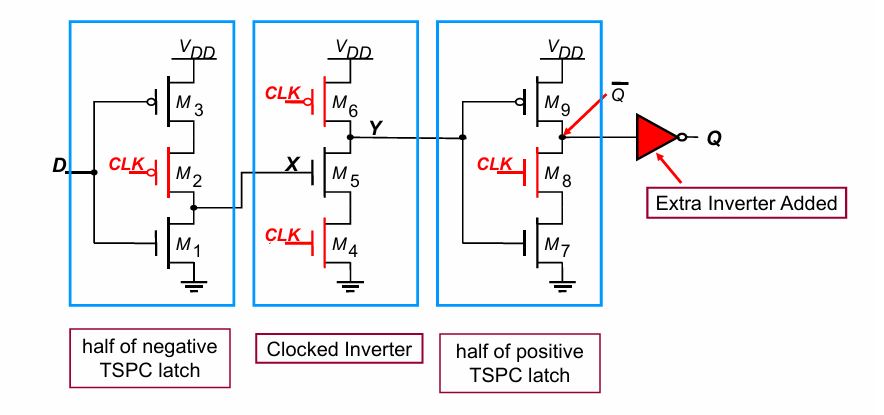
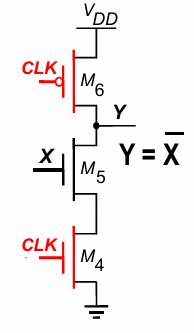
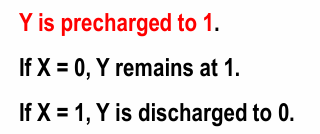
其工作原来如下:
clk=0时,D的非被传输到X,同时Y被预充为高。CLK=1后,Y点进行计算,得到X的非也就是D的值,同时Y的值经过半个Latch传到Q前面的反相器,再经过一级反相器达到Q。
其参数分析如下:
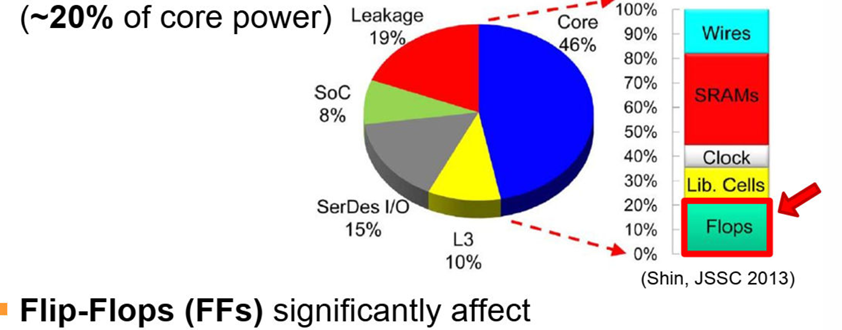
低功耗register设计
在现代处理器中,FlipFlops占据总功耗的约20%,因此低功耗的寄存器设计是有必要的。
一个好的寄存器应当具有以下特点:
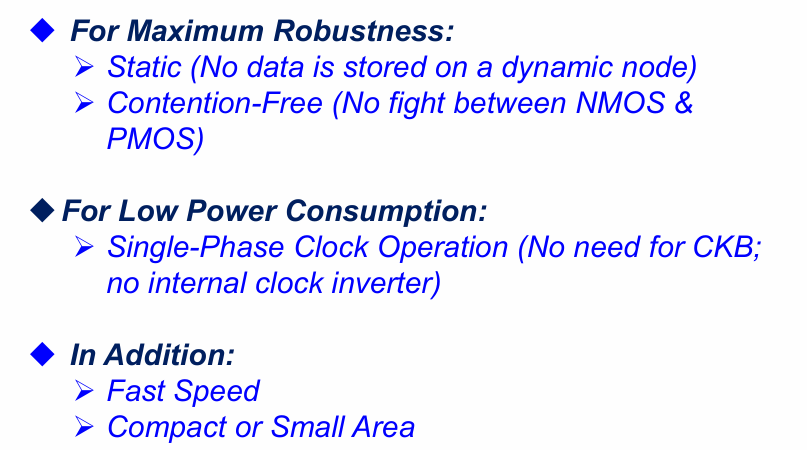
案例分析: S2CFF
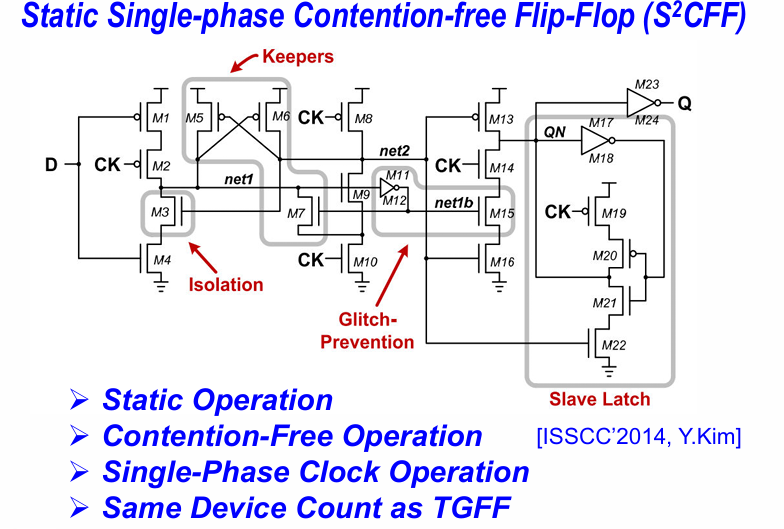
(待补充)
非双稳态电路
施密特触发器
施密特触发器的特性在于拥有非对称的电压阈值:
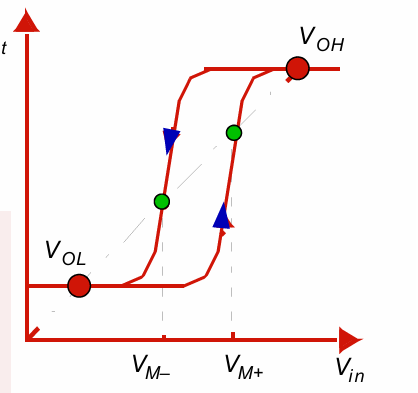
对于从低电压的传输,需要更高的电压阈值;对于低电压的传输,需要更低的电压阈值。
其电路符号如下:
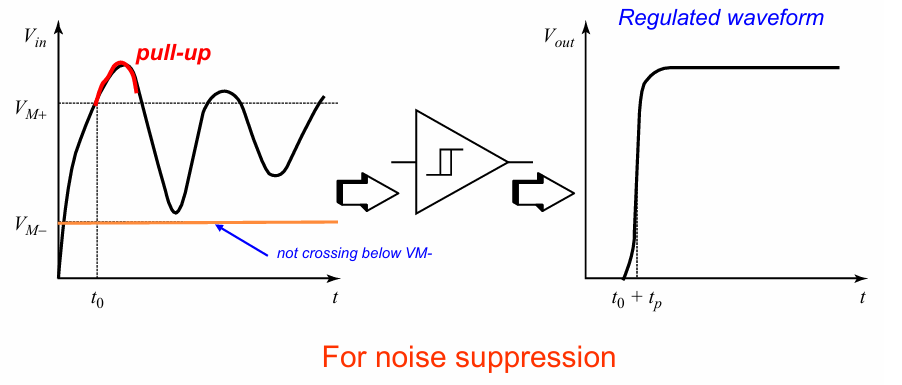
施密特触发器一般被用作整流器,从而抑制电路的噪声:
其CMOS实现如下: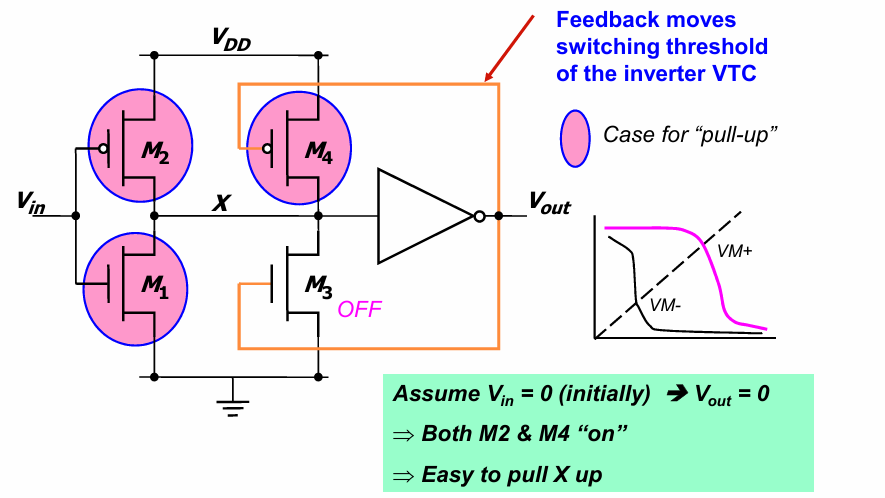
当VIN为0时,X为1,通过一个反相器的反馈,将M4打开,M3逐渐关闭,逐步将VOUT降到0.
VIN=VDD时,通过M3逐步将X拉低,将VOUT升高到VDD
环形震荡器
(待补充)
Lecture6 低功耗设计
关于低功耗设计的内容占据3个课时
现代集成电路中的功耗问题
在数据中心服务中,功耗意味着成本,在高性能计算领域,功耗和散热制约着电路的性能,在移动端,功耗影响电池寿命。
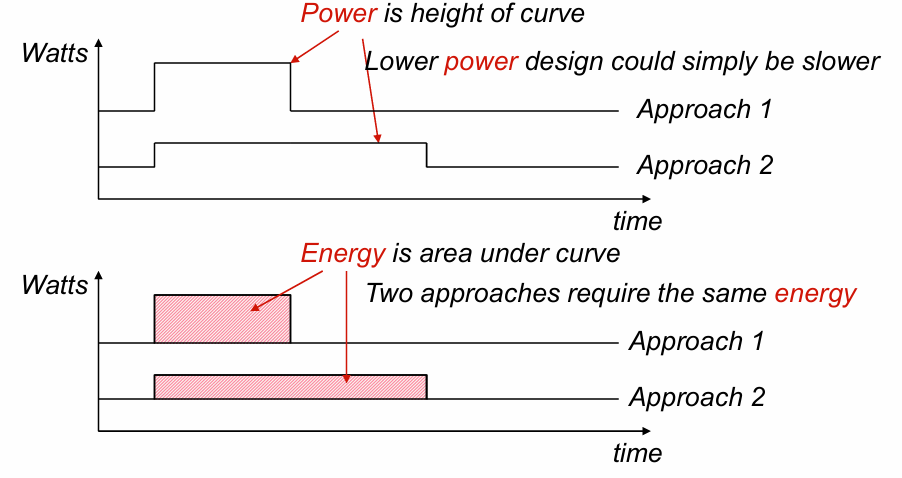
power vs energy
功耗和能耗是不同概念。
对于同一个计算来讲,消化的能量是功耗和时间的乘积(曲线的面积),一个低功耗电路意味着电路的瞬时功率更小(曲线的高度),但是有可能因为耗时更长使得总能耗变大。
功耗分布情况
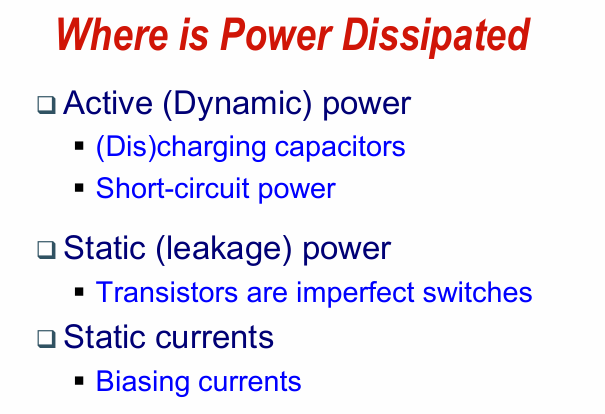
集成电路中,功耗分为静态功耗,动态功耗和静态电流(DB端的反偏PN结电流)
动态功耗
动态功耗正比于翻转频率:
动态功耗的的来源有3个:
- 电容的充放电
- 电流翻转过程中的短路电流
- 临时产生的毛刺(gliches)
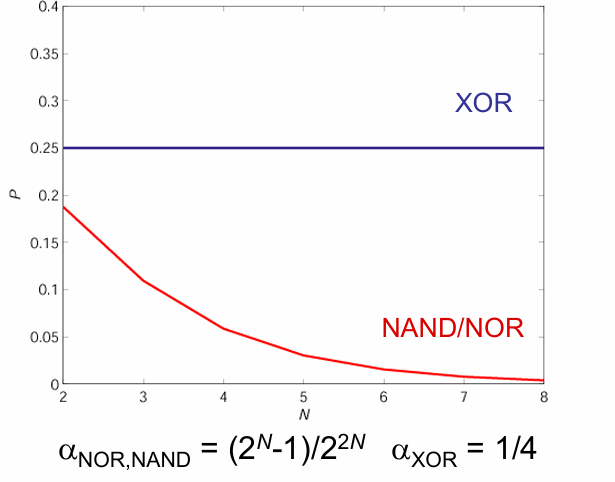
电路功能对动态功耗的影响
由于CMOS电路的动态功耗只与输出从0向1变化有关(参见前面对反相器的分析),所以动态功耗的表达式如下:
假设输入的概率均匀分布(0和1各占一半),则相同时钟频率下,不同逻辑功能从0翻转到1的概率不同。
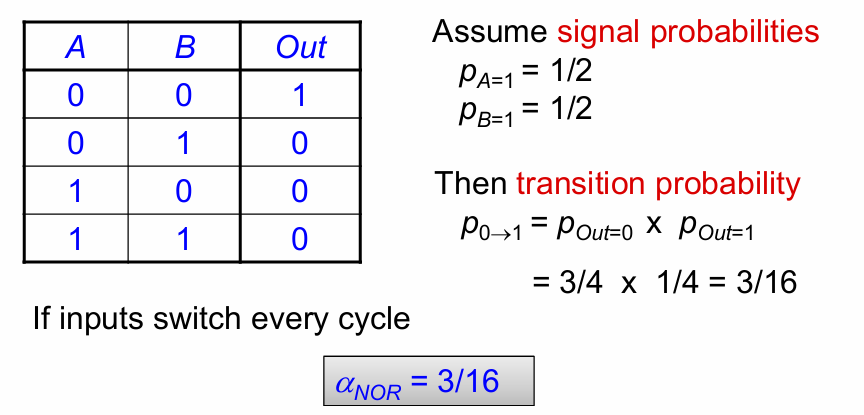
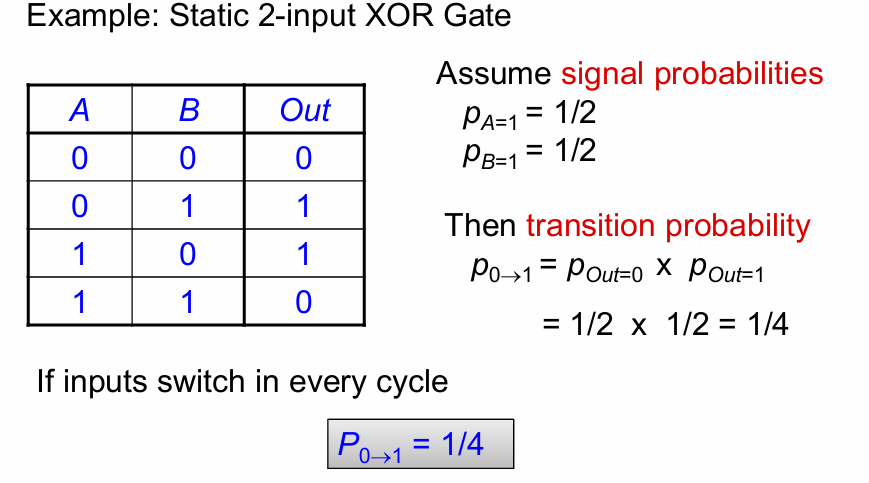
这个概览在多级或多输入的情况下更加明显:
而对于动态逻辑,差分逻辑来讲,其动态功耗都大于CMOS逻辑。
CMOS中的毛刺
考虑如下电路:
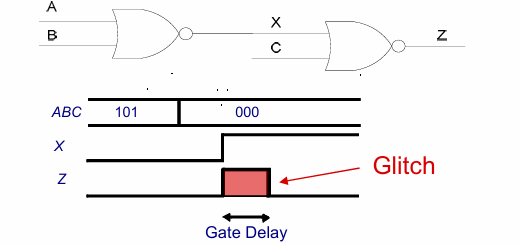
ABC同时由101变为000,在AB由10变为00时,输出信号X由0变为1,这个时间晚于C,导致中间有一个阶段,X=0,C=0,Z被短暂的拉高。当X完成计算后,Z又被重新拉低。
这种问题也被称作动态冒险(dynamic hazard):是指输入的一次变化造成了输出的多次变化。
分析这种毛刺产生的原因,是因为最后一级逻辑门的输入没有同时到达。
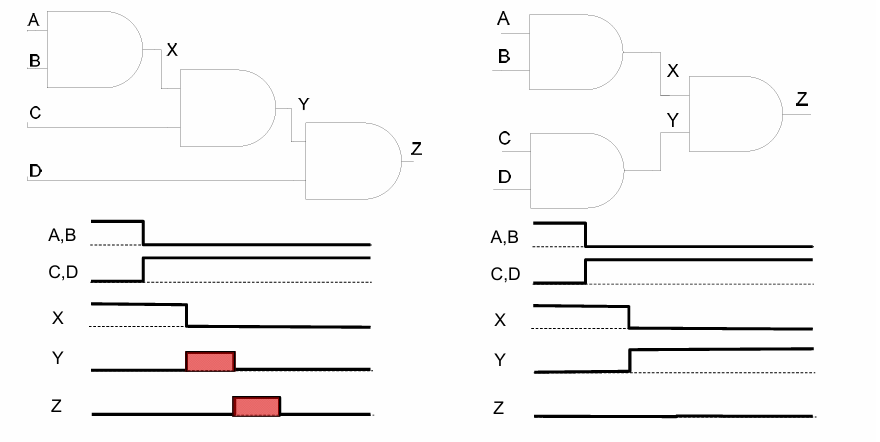
如果重新调整电路的结构,使各条路径上的延迟尽量平衡,则可以消除掉相应的毛刺。
短路电流
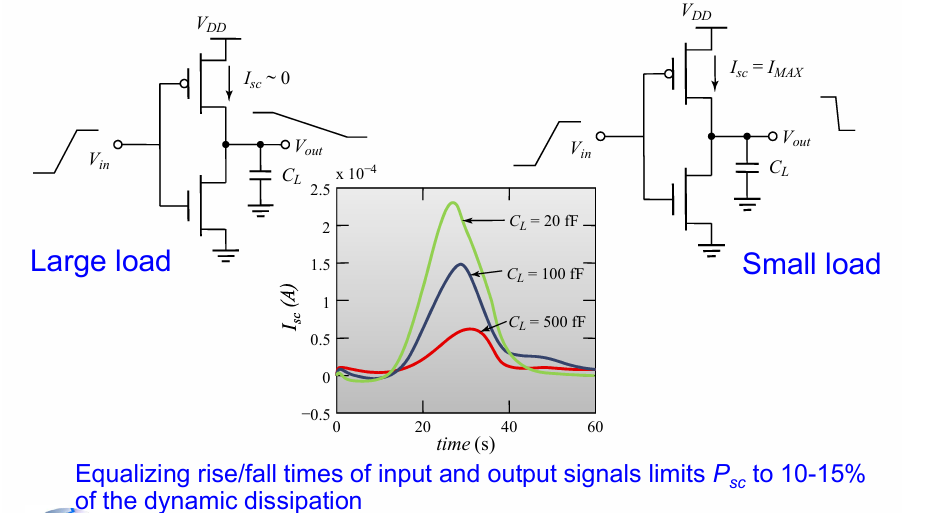
短路电流产生的原因是在输出翻转的过程中,有一个阶段上拉网络和下拉网络同时导通。
通过调整上升延迟和下降延迟的时间尽量相等,可以把短路电流功耗占据动态功耗的比值降低到10%~15%
静态功耗中的漏电流
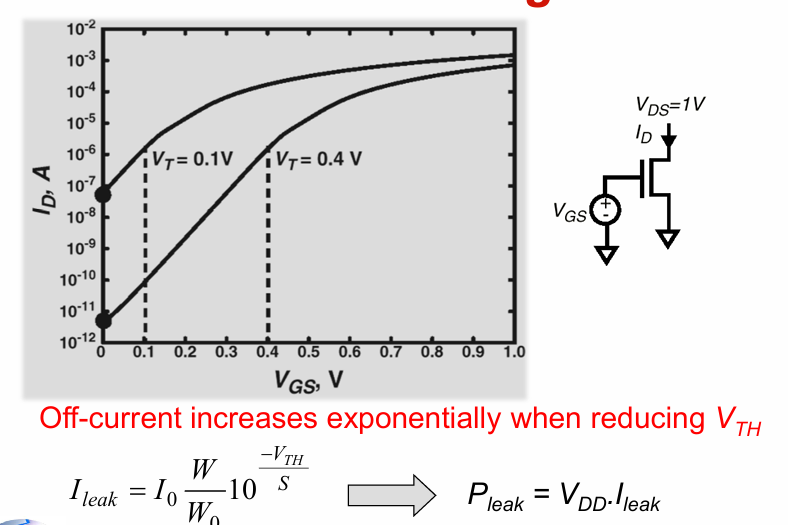
亚阈值漏电 sub-threshold leakage
一般而言栅电压低于阈值电压时,我们认为晶体管被关闭。但晶体管并非理想器件,实际上在关闭时仍存在漏电流。且器件的阈值电压越低,这个漏电流越大,且呈指数增长。(这也是为什么finfet效果更好,因为关断的效果更明显)。
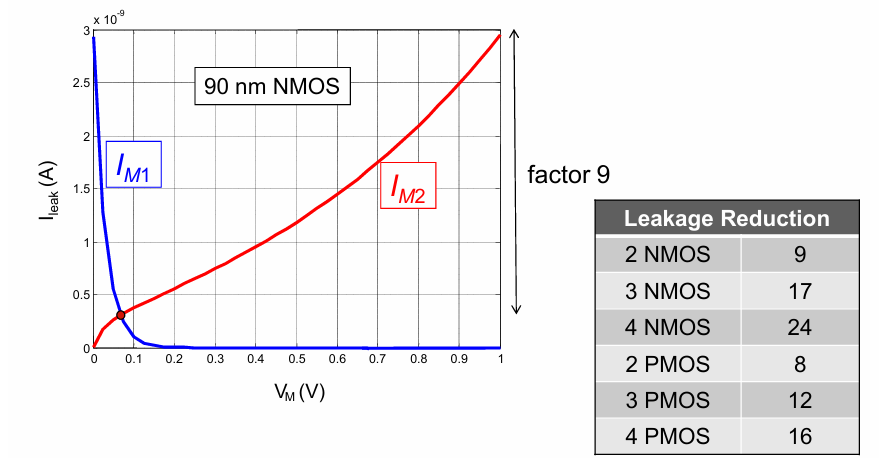
堆叠效应 stack effect
有趣的是,当多个管子堆叠时,可以有效降低亚阈值漏电:
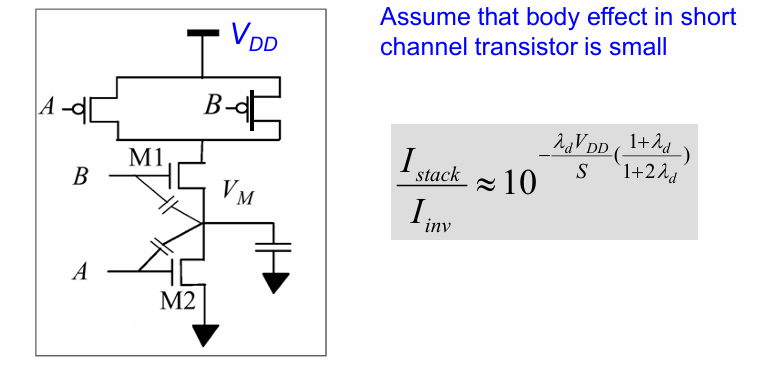
然而,堆叠效应同时也会造成电荷共享问题。
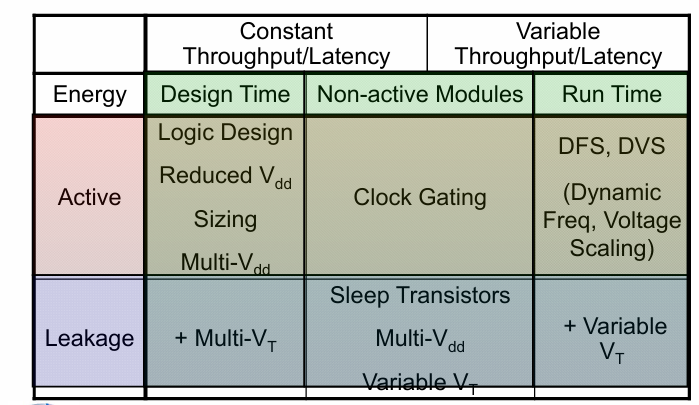
低功耗优化策略
针对不同的功耗和电路工况,可以总结出如下所示的低功耗优化策略矩阵:
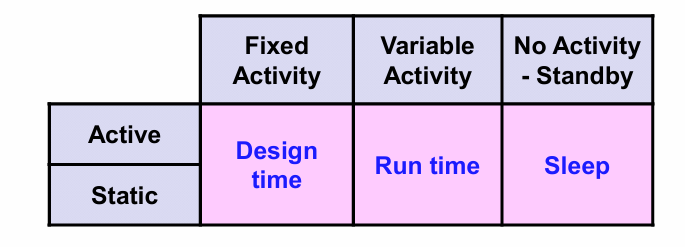
不同的优化测量分布对于矩阵中的如下位置:
多电压域 multiple supply voltages
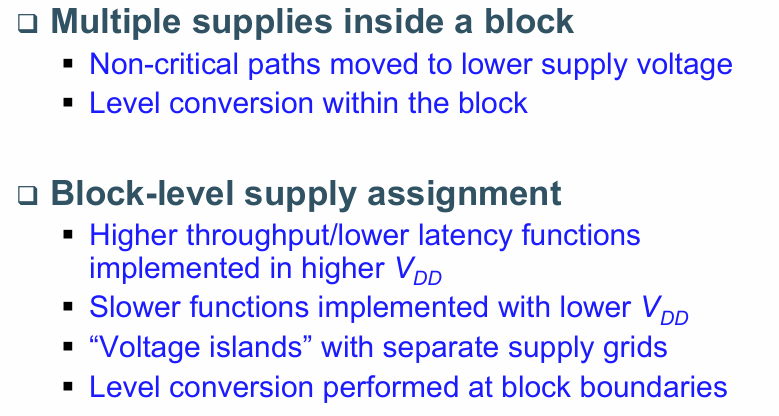
分为2种,一种时block内的多电压,一种是不同function块的多电压。
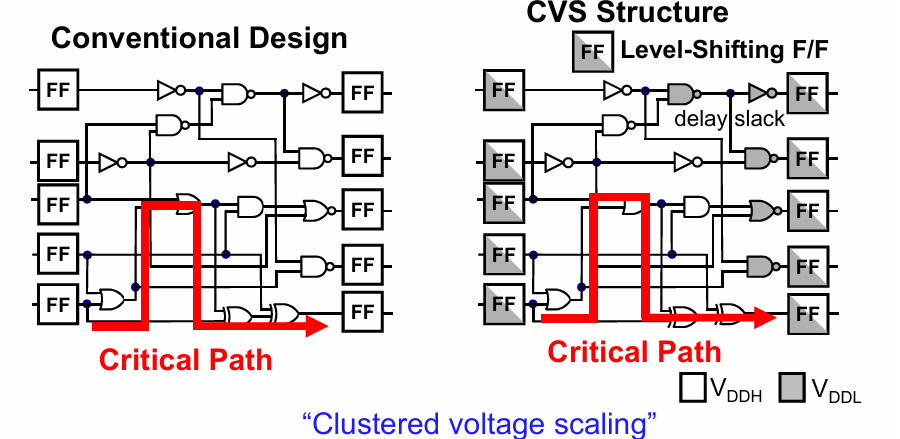
例如可以针对同一个组合逻辑中的关键路径提高电源电压,以达到更快的计算速度。其他模块则采用较低的电压。
上升电路中的电压转换寄存器(level convertiong FF)的实现方式如下:
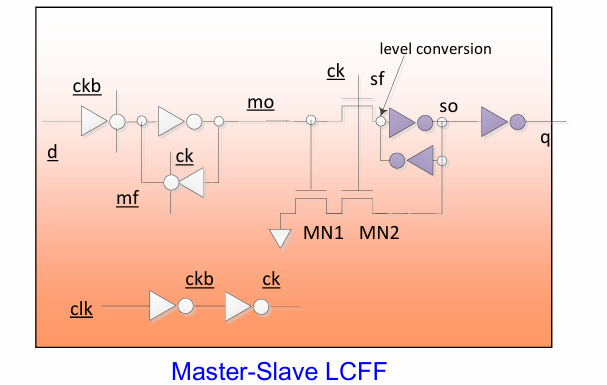
可以实现d=vddl,q=vddh的变化
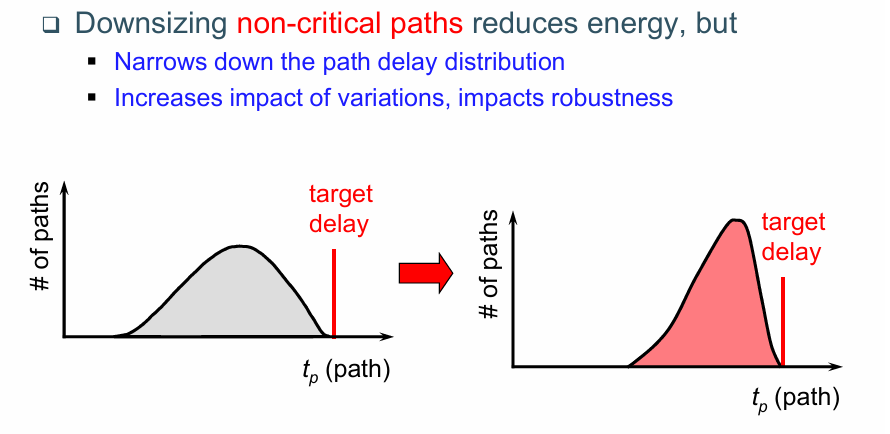
通过模块内的多电压域技术,实际上是提高了非关键逻辑的延迟。由此带来的问题是,改变了不同路径的延迟分布,有可能带来电路稳定性的问题(从统计学的角度):
具体的多电压域有以下2种实现方式: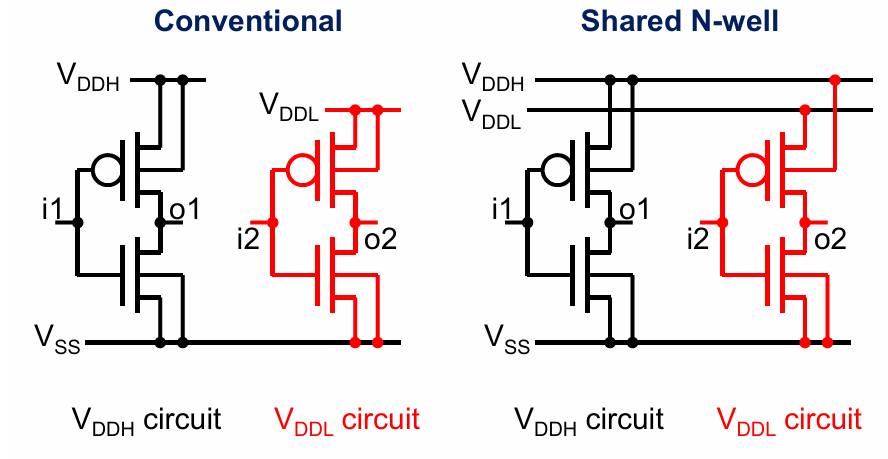
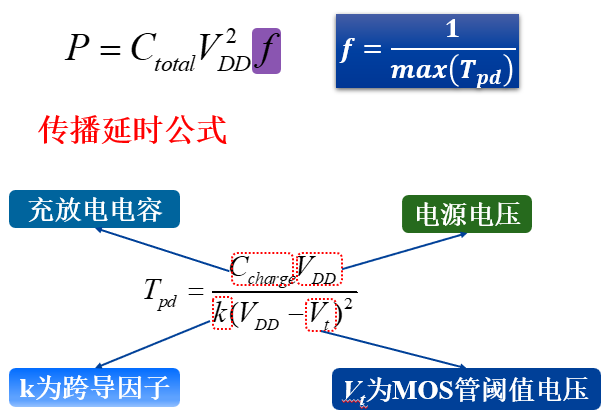
降低电源电压 supply voltage reduction
数字IC中一个典型的数据通路如下:
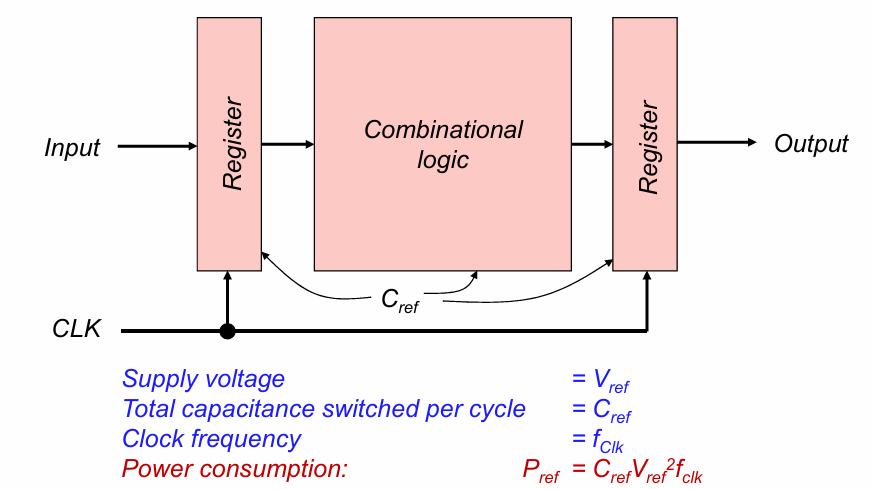
其功耗与电源电压的平方,以及电容, 电路的频率成正比,因此理论上降低这三个值中的任何一个都可以有效降低功耗。
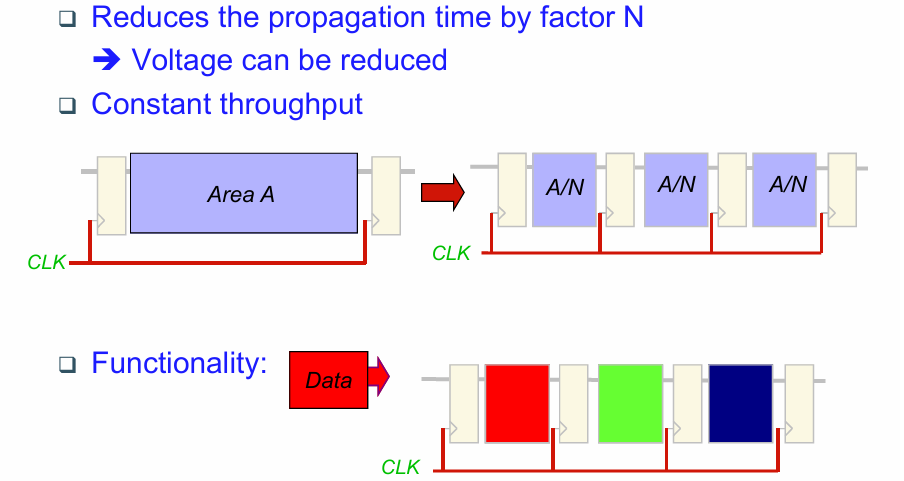
并行降低功耗
通过并行技术可以有效降低电路的功耗,其原理如下:
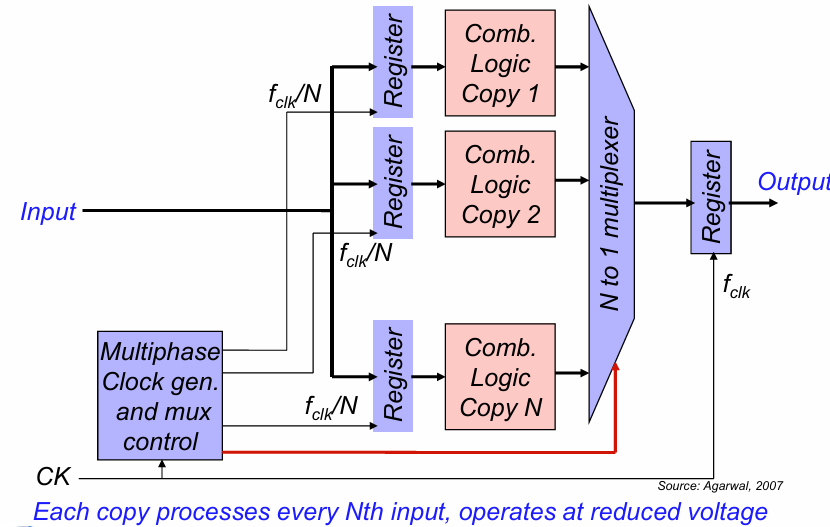
通过将组合逻辑的硬件复制多份,将其计算能力提高N倍。
注意,组合电路执行的并不是相同的逻辑运算,而是分时运算。
例如,如果将前面采样寄存器的时钟周期保持不变,而在每个周期内送入n组不同的输入,它们分别被送入不同的n组组合电路中进行运算。经过原来的一个时钟周期后,所有计算完成。将输出频率提升n倍,通过mux将其结果输出,就可以在原来的一个时钟周期内得到n个不同的计算结果,相当于将电路性能提升了N倍。
而低功耗技术则是保持末端采样的频率不变,而将前方的采样频率降低为原来的1/N。由于采样频率的降低,组合逻辑可以用更长的时间完成计算,因此可以降低电压。
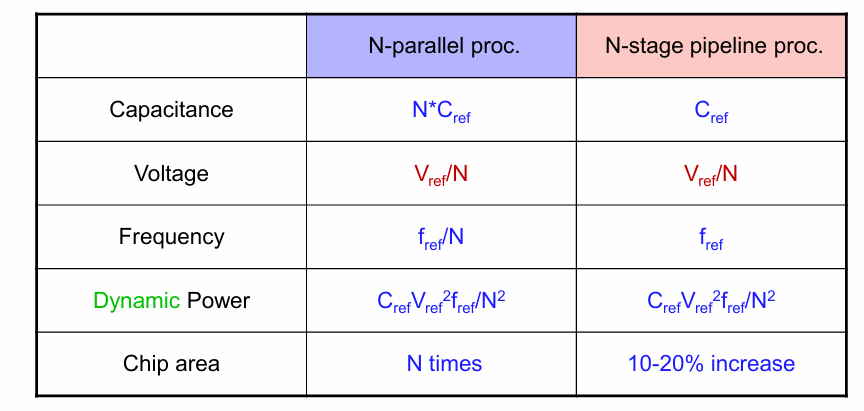
更细节的分析如下:
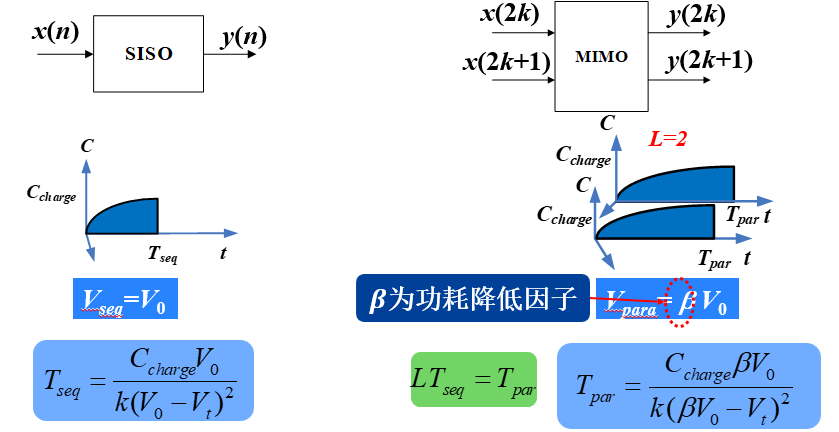
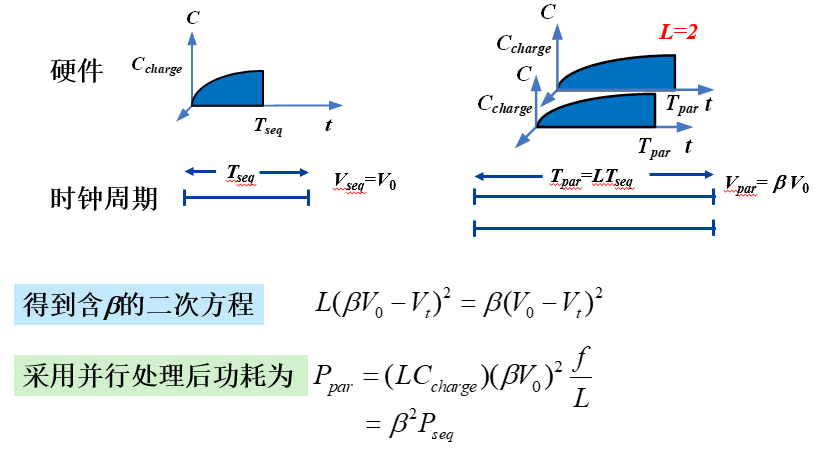
即通过并行后将电源电压降低为原来的$\beta$倍,功耗降低为原来的$\beta^2$倍。
流水线降低功耗
流水线降低功耗的原理是,通过流水线提高电路的工作频率,然后降低工作电压,最终达到降低功耗的目的:
不同方法的总结如下表:
DVFS Dynamic voltage and frequency scaling
动机: 在实际应用中,电路的活动频率和时间的相关性很大。例如在PC的日常使用中,CPU大部分时间是在待机,只有少部分时间执行高密度计算任务:
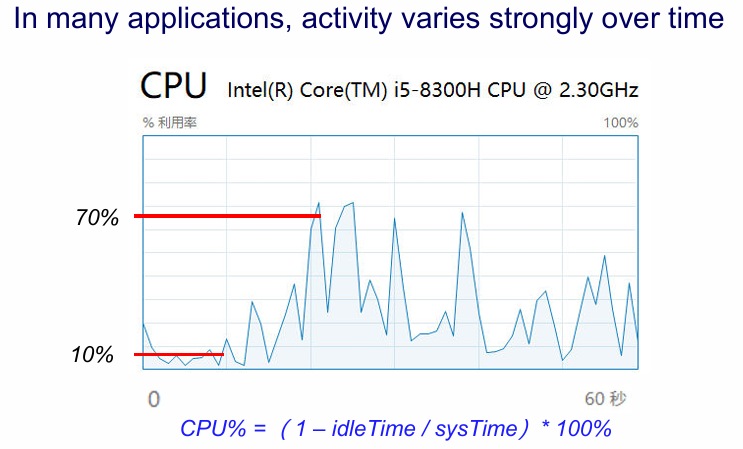
如果单纯降低工作频率,无法满足高性能计算的实时性要求:
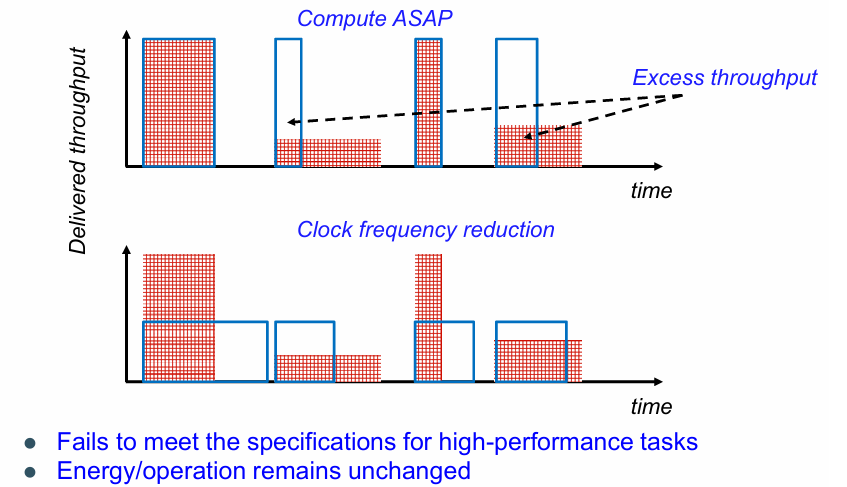
通过DVFS技术,则可以有效提高电路的瞬时性能,而保持总能量消耗不变:
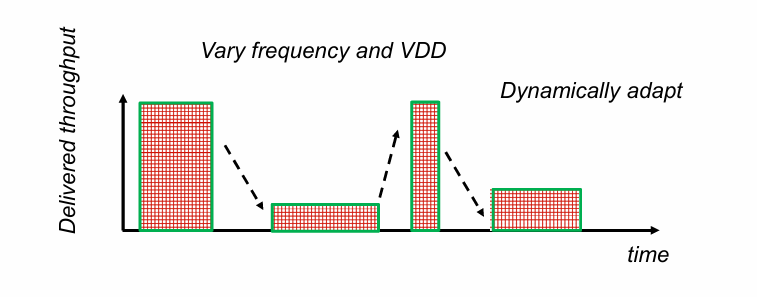
(这有点像人,同一件工作如果紧急,就提高效率争取快速做完。如果并不很着急,就暂时摆烂慢慢完成)
电源电压和工作频率的关系如下:
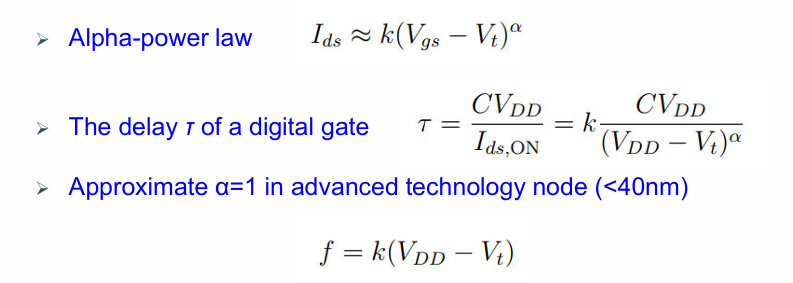
在先进工艺下,频率和电压基本成线性关系。
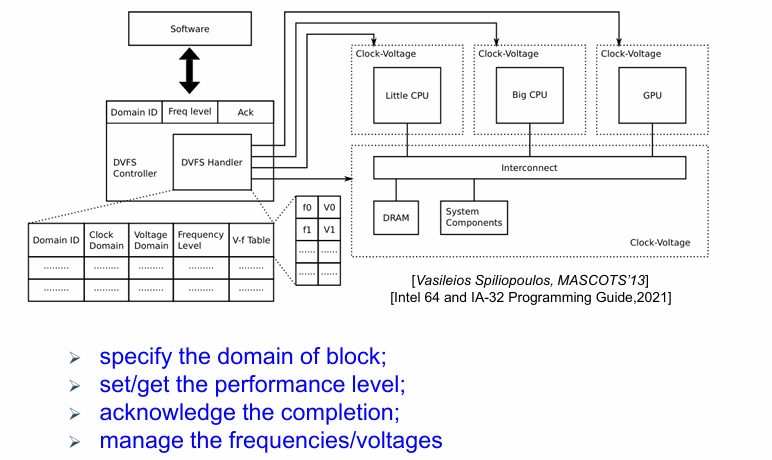
DVFS框架
一个典型的DFVS框架如下:
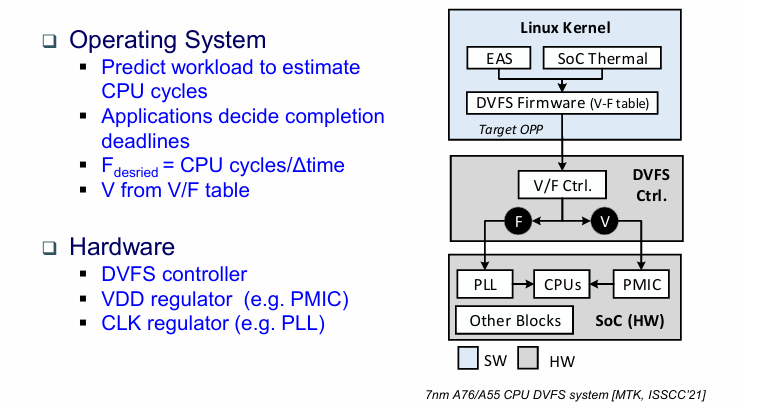
应用来决定任务的DDL,操作系统根据性能评估CPU的工作负载,选择合适的电源电压和频率节点。
通过软件控制硬件完成相应的DVFS操作。
例如,对苹果A13处理器,从待机到全功率运行需要大约100ms的时间:
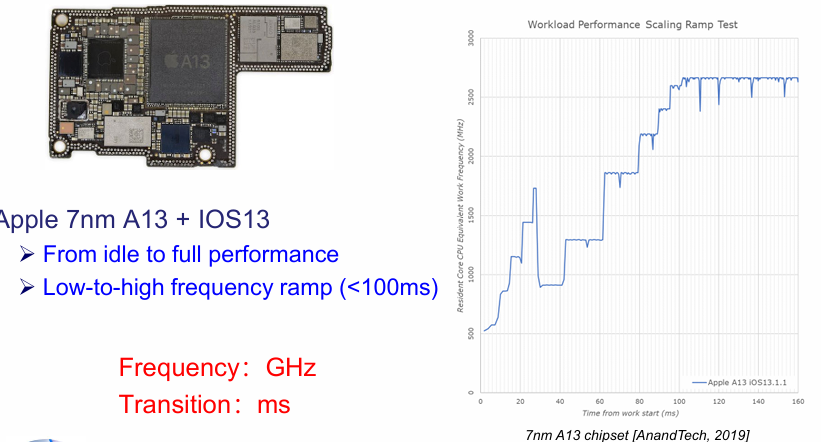
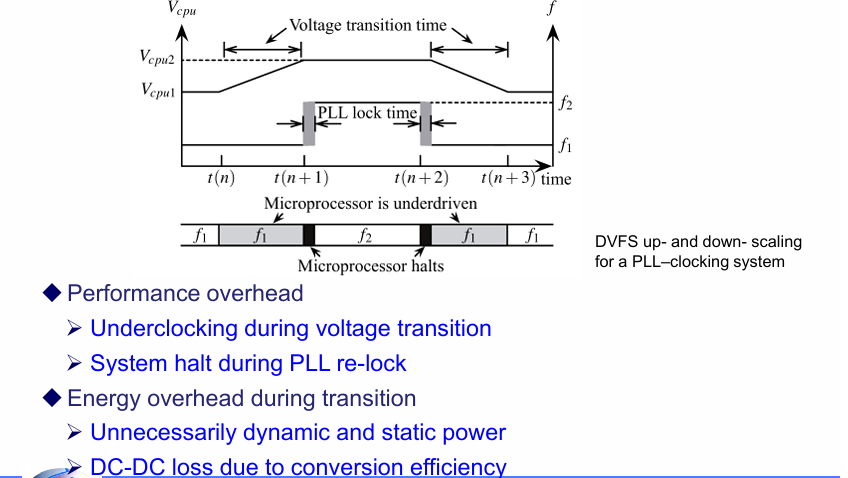
DVFS的开销
DVFS会对系统造成额外开销,主要有以下几个方面:
clock gating technique 门控时钟技术
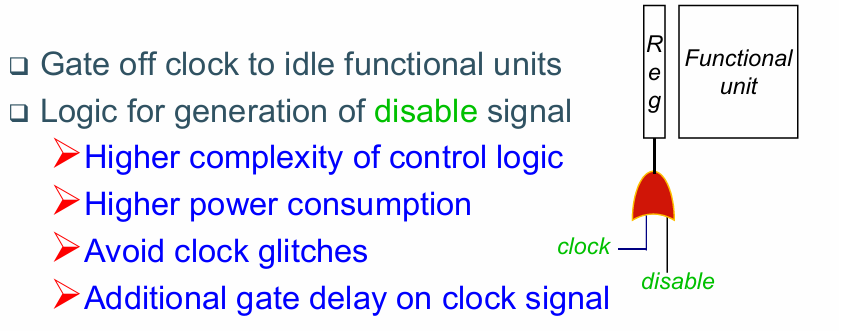
通过为时钟信号加上一个disable(或者enable),实现时钟的控制,后面的电路在没有时钟信号时都不再翻转,从而省电。
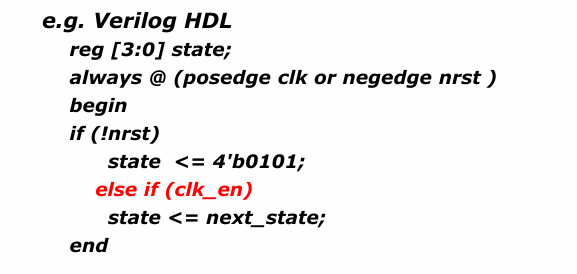
相应的verilog代码如下:
通过clock gating技术可以显著减少能耗(70%)
power gating 电源门控
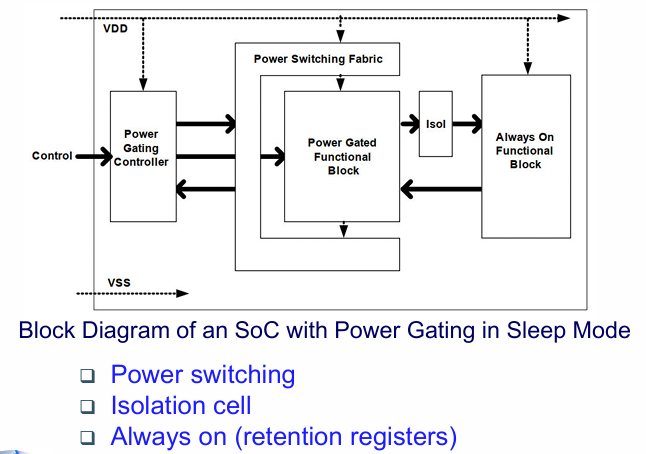
- 电源门控控制器(Power Gating Controller): 控制芯片中关断模块的电源何时关闭并给特殊的cell如retention register输出必要的使能信号;
- 电源切换结构(Power Switching Fabric): 也称电源开关(Power Switch),实现电源关闭的逻辑单元,一般由后端实现阶段加入并按照一定规则摆放;
- 始终开启模块(Always-on Module):电源一直保持打开的模块;
- 隔离单元(Isolation Cells):简称ISO,一般在关断模块到电源始终开启模块方向的信号需要加入此类cell;
- 保留DFFs(Retention DFFs):特殊的寄存器能够在主电源关断的情况下保持数据不丢失,只有当关断电源时仍然需要保留部分数据的时候才需要此类cell。
门控电源域
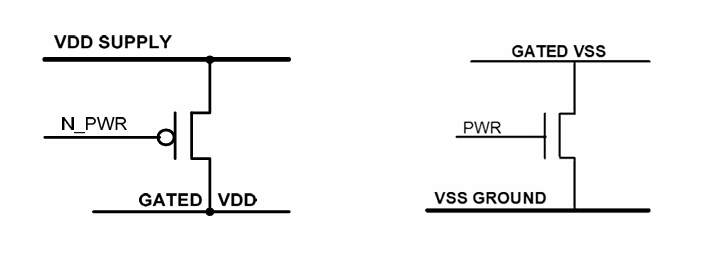
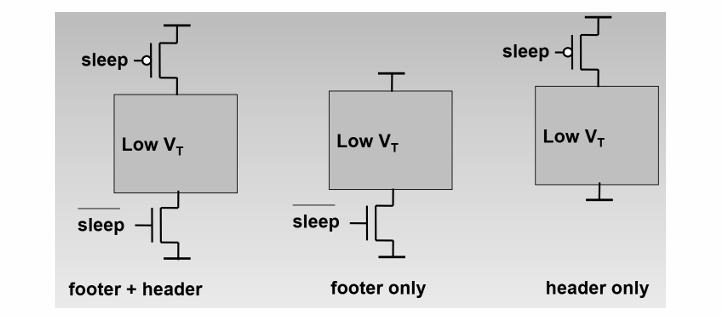
通过门控决定电源是否接入或接地。
一般使用基于PMOS的”header”,有时也使用基于NMOS的”footer”。在实际应用中,电源门控的方式主要有两种:关闭VDD或者关闭VSS,但在实际应用方面以关闭VDD为主。
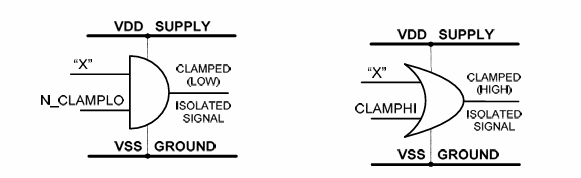
隔离单元 ISO
隔离单元在电源关断(Power Gating)技术中的主要作用是在模块的电源被切断时,隔离该模块与其他模块之间的信号传递,防止因模块电源关闭而对其他模块产生影响。也就是说,当一个模块的电源被关闭时,隔离单元可以阻断该模块的输出信号,防止这些信号对其他模块产生干扰。
方法是通过产生纯净的0或1信号。
数据保留 data retention
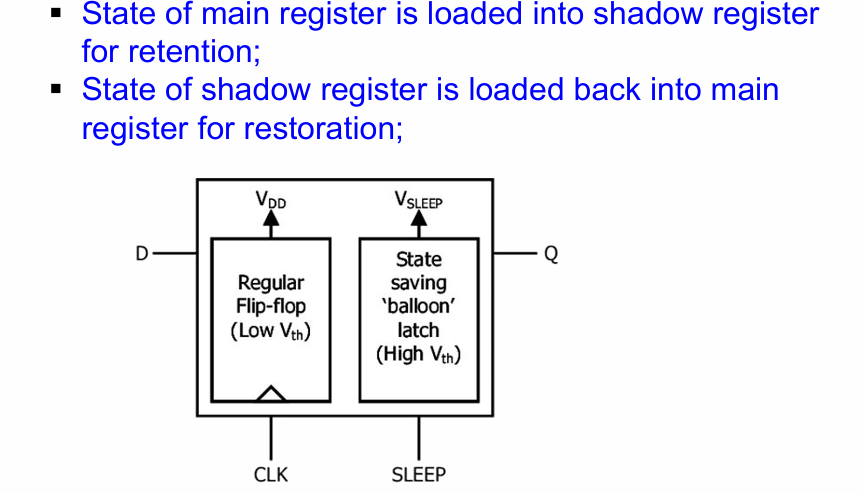
添加Power gating 的示例
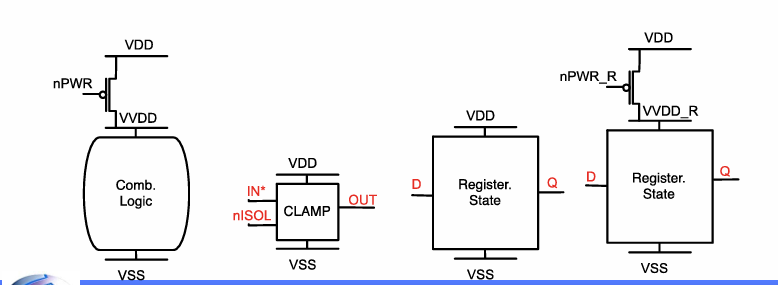
使用高阈值晶体管实现,N管比P管节约更多面积。
门控电源的问题
门控电源会带来2个问题:
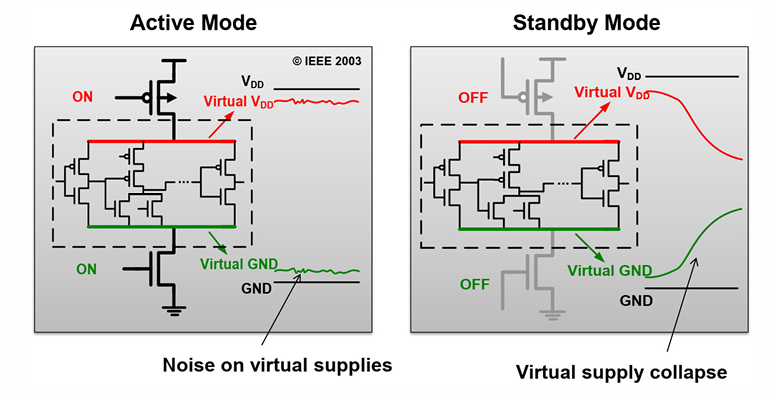
由于门控电源的加入,工作时虚拟vdd 和虚拟vss 2根线上可能存在噪声。
当模块关闭后,虚拟功能线上的电压很快发生变化,电路中保持的状态迅速丢失。
添加解耦电容 decoupling capacitor
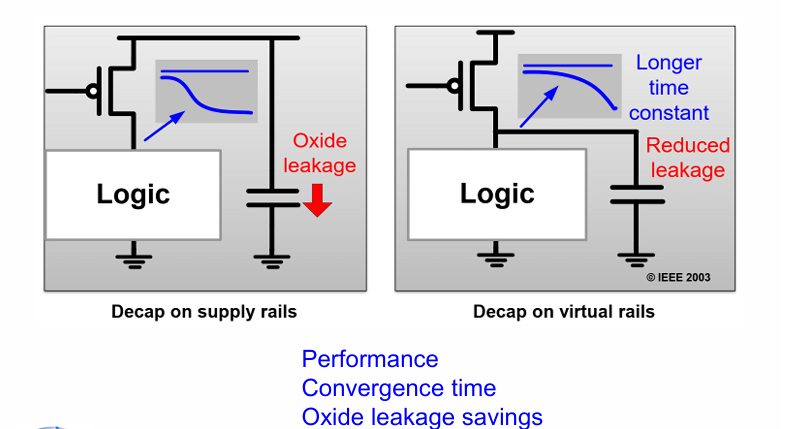
解耦电容可以有效保证电路工作时的性能,同时让其中的信号更长时间保持稳定。也能够有效降低氧化层漏电。
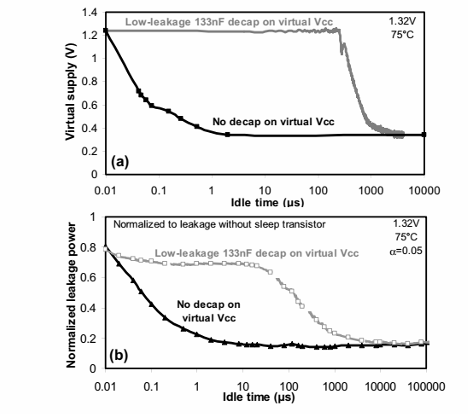
苏醒时间问题
传统的门控电源在休眠后,需要很长时间苏醒才能正常工作(大约1k~1M时钟周期不等),这使得对于一些只需要短期休眠的任务无法应用。
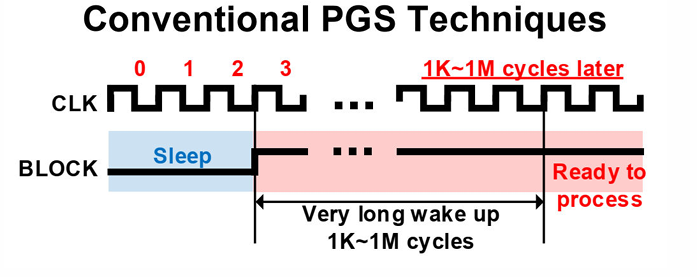
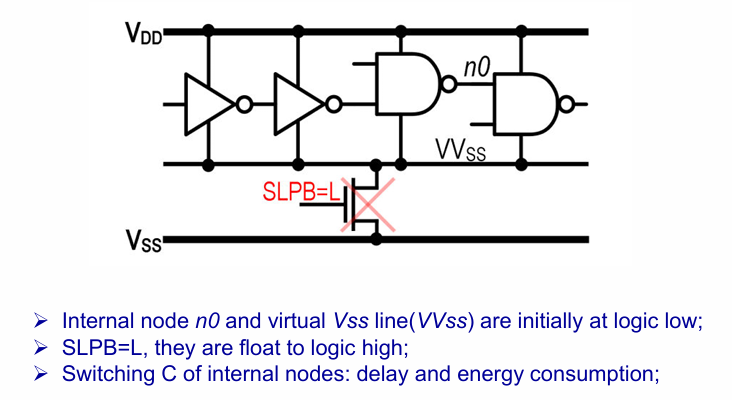
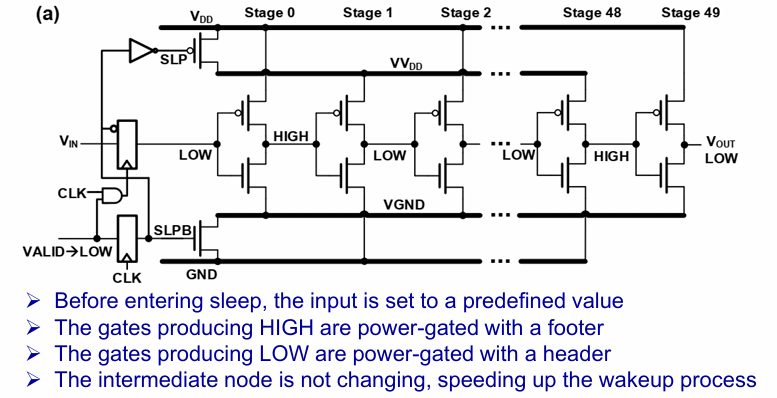
苏醒时间慢的原因是需要对电路的中间节点通过footer进行放电。
一种改进方案:
体偏电压调节
通过第二节器件的知识我们已经知道,晶体管的阈值电压与体效应有关,通过调节体偏电压的大小,可以控制阈值电压。而阈值电压决定漏电流的大小。
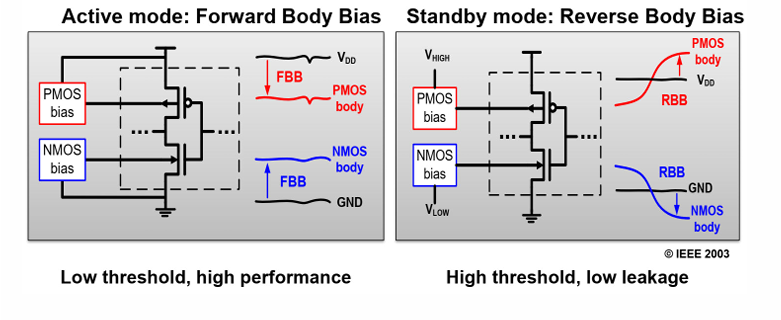
动态体偏电压的调节有2个思路:
- 电路工作时,设置为正偏,降低VTH,提高性能
- 电路休眠时,设置为反偏,提升VTH,降低功耗。
Supply Voltage Ramping (SVR)
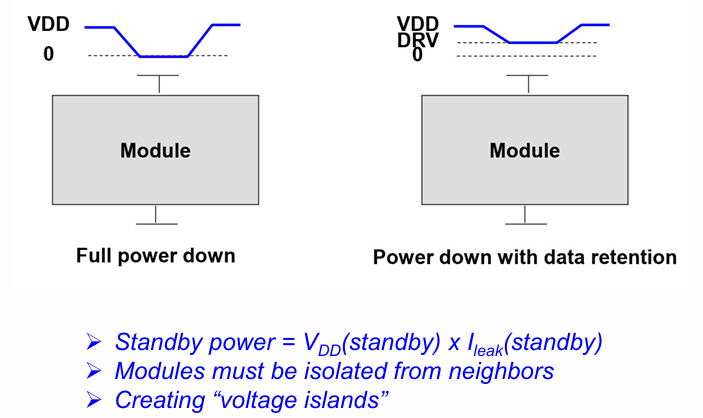
在休眠时,干脆关闭电源电压或降低电源电压,以进一步节约功耗。
可以有效减小漏电流
power gating总结
超低电压计算
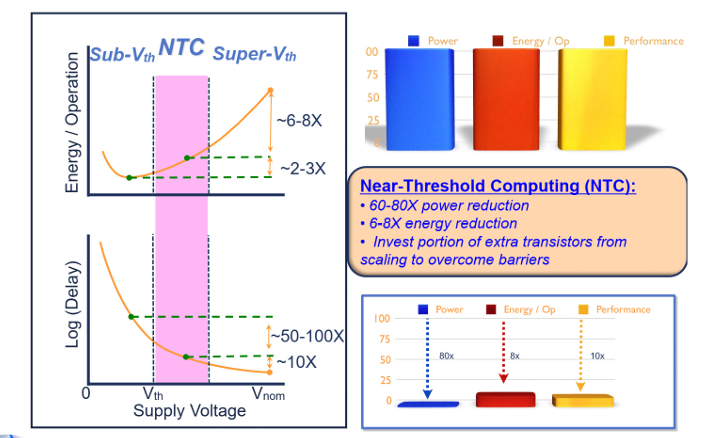
要获得最高的计算性能,需要将工作电压提高,以加快电路的计算速度。
然而如果想要是电路每次操作的耗电达到最低,则工作电压降低到阈值附件。
在一些边缘侧的供电受限,且不需要高性能的设备中,这类设计是很有用的。
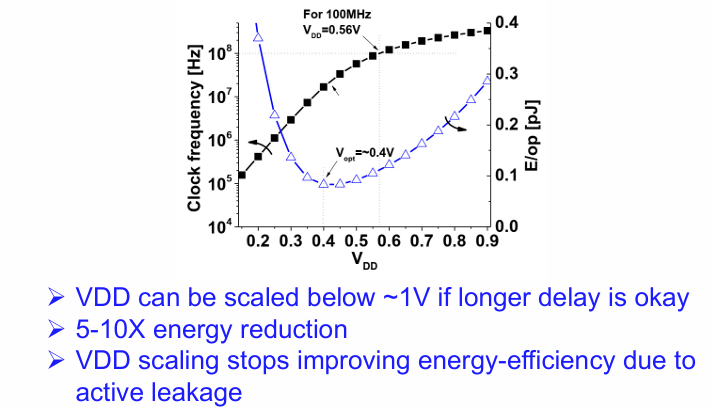
工作电压VDD不能无限降低,因为再低下去电路的漏电会很大。
logic sizing
在超低电压下,漏电电流变得和驱动电流大小接近。需要考虑电路的sizing问题。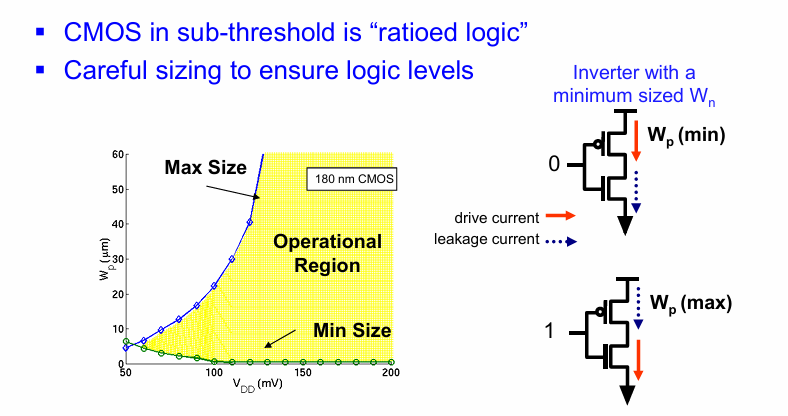
同时要考虑工艺角问题: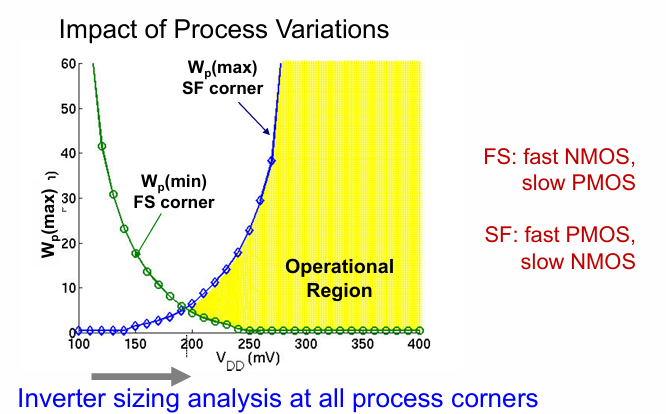
Dynamic Leakage-Suppression Logic 动态漏电流抑制
(待补充)
Variation Adaptive Circuits 自适应电路
Timing Resilient Circuits
(待补充)
Lecture7 Arithmetic Circuits 算数电路
加法器
加法器作为算数逻辑运算的基石,很多时候也是电路的性能瓶颈。
对加法器的优化主要在于2方面:
全加器
全加器接受3个输入信号(A,B,$C_i$)和2给输出信号(S,$C_o$)。又被称为3-2压缩器。
其中输出和输入的逻辑如下:
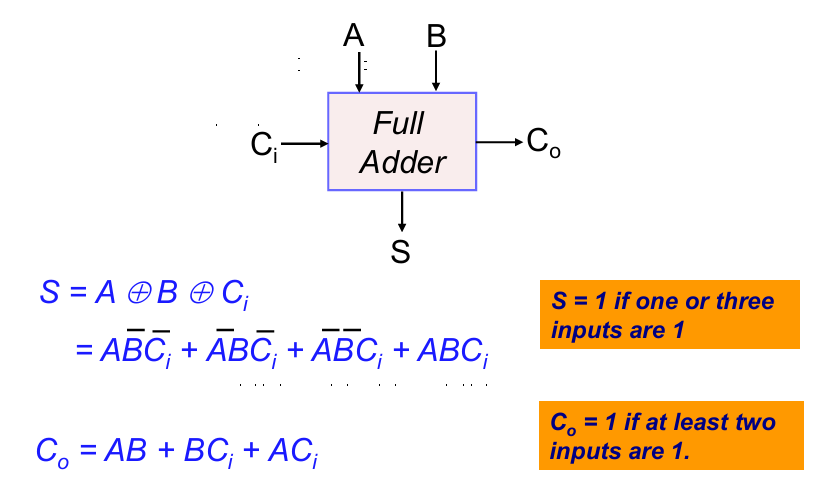
此外我们还可定义如下的中间变量,用于后续推理。
$$G = AB $$
$$P = A\oplus B$$
$$D = \bar{A}\bar{B}$$
其中G代表generation,表示进位的产生。P代表propagation,表示如果上级产生一个进位,则可以被传播到下一级。D代表delete,表示任何进位都会在这一级消失。
行波进位加法器 The Ripple-Carry Adder
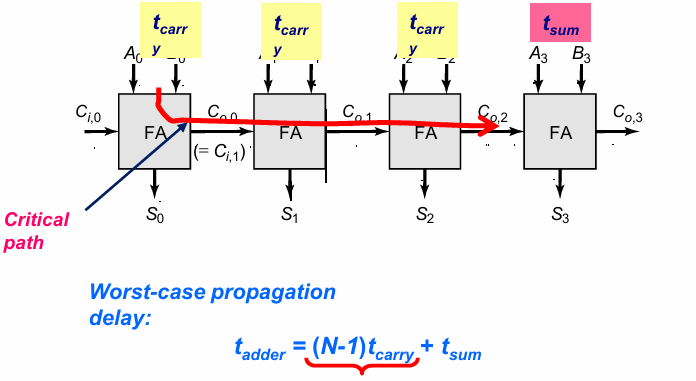
一个最简单的加法器实现就是将多个全加器串联,得到行波进位加法器。其中进位由低到高逐级产生。
电路的关键路径是n-1级的进位加上最后一级的求和。
这样的加法器,其关键路径延迟是很长的,与加法器的位宽成线性关系。
全加器的电路架构
我们重构全加器的逻辑表达式:
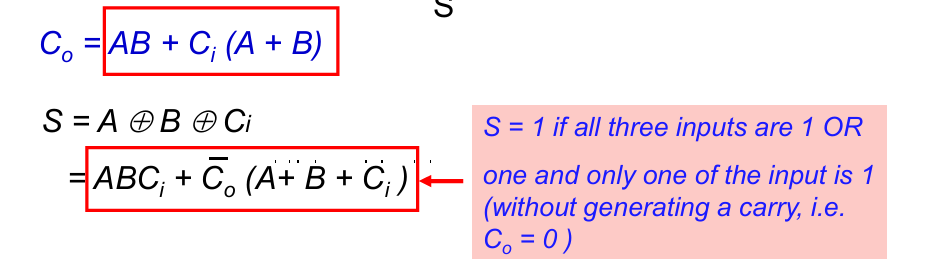
上述逻辑可以用以下的28管CMOS电路实现: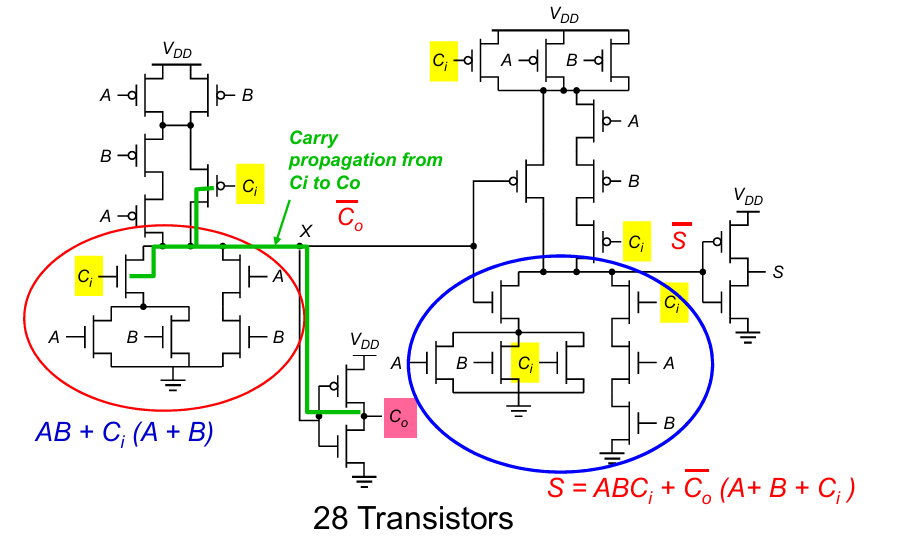
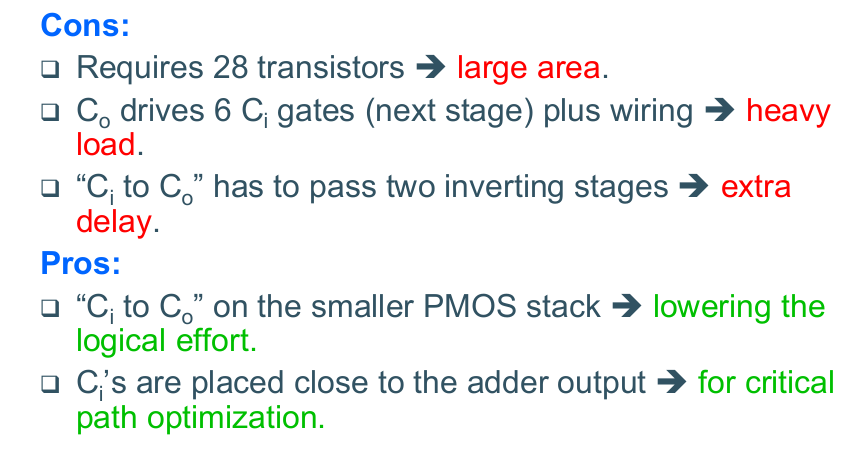
上述实现的优缺点如下:
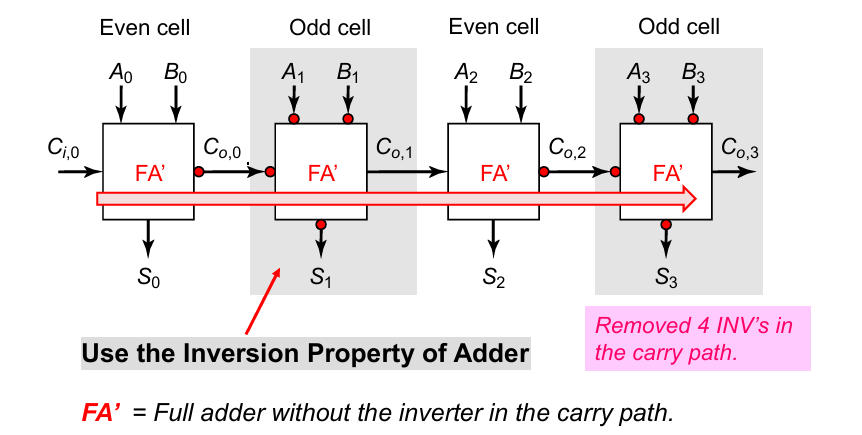
改进措施
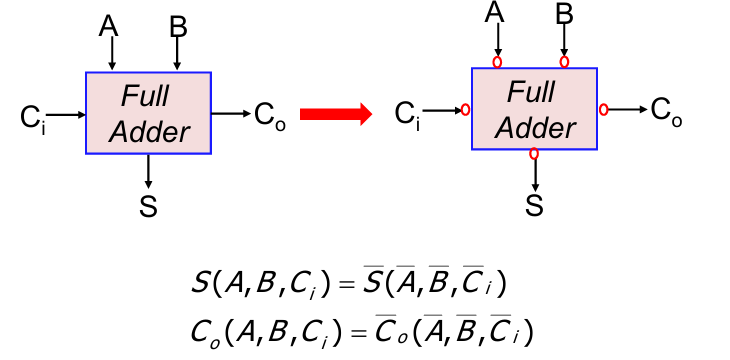
同一计算逻辑,如果将输入反向,输出逻辑也反向,则得到的结果不变。
通过将奇偶方向加上或去掉反相器,最终每4位可以去掉2个反相器,同时在关键路径上减少了4个反相器:
曼彻斯特进位链加法器
(待补充)
旁路进位加法器
旁路进位加法器的思路很简单:
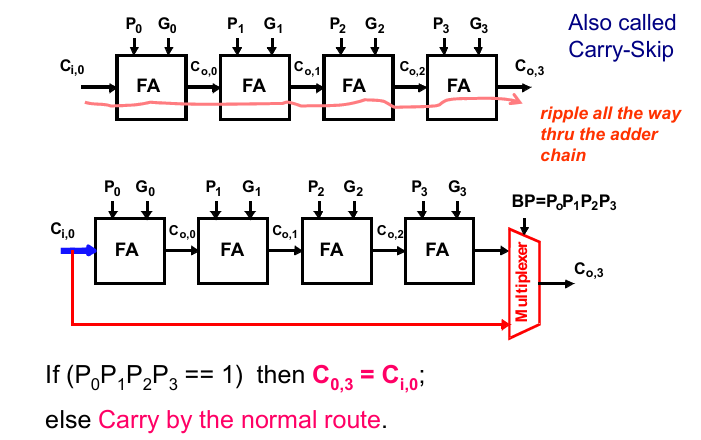
通过计算进位是否可以向下传递,通过添加一个Mux提前算出进位结果。
最坏情况下的关键路径如下:
和行波进位加法器一样,旁路进位加法器的延迟与位数也是线性关系的: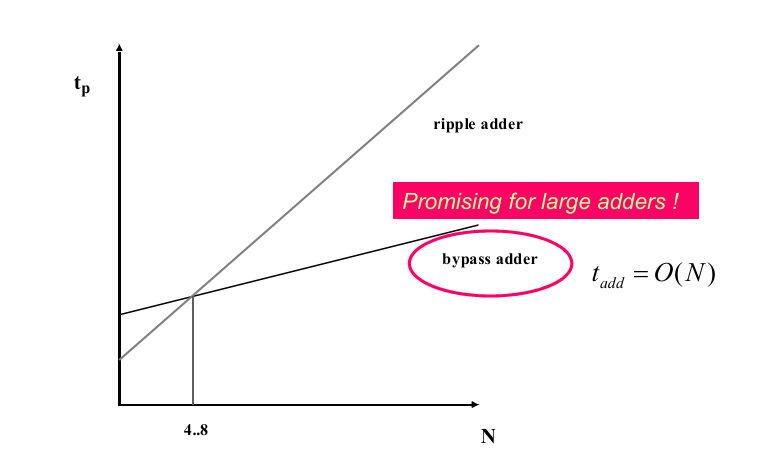
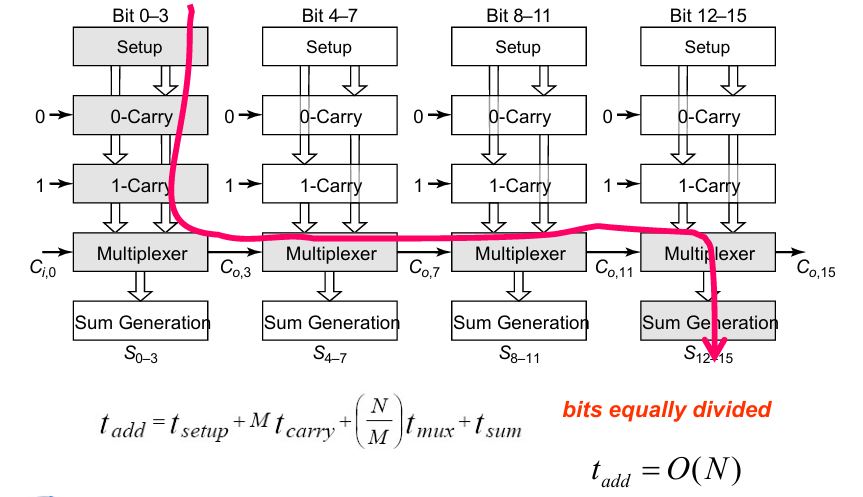
进位选择加法器
进位选择加法器的思路是,提前计算carry=0和carry=1的2种结果,通过传入的carry来选择最终的输出。
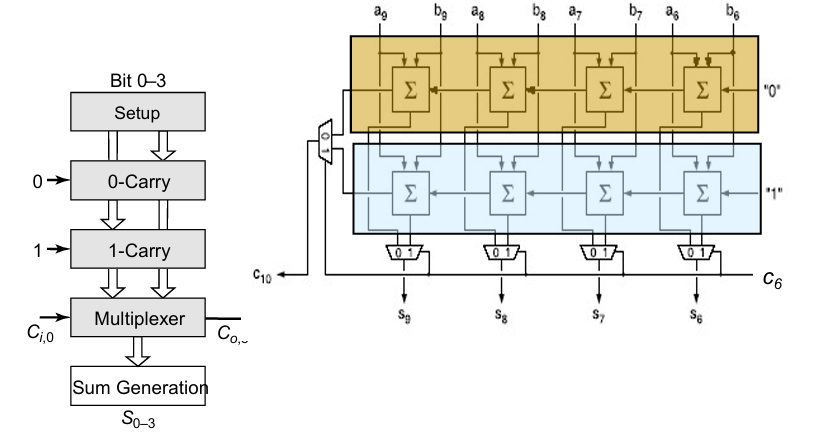
平分各个级数时:
也可以按照平方的形式划分: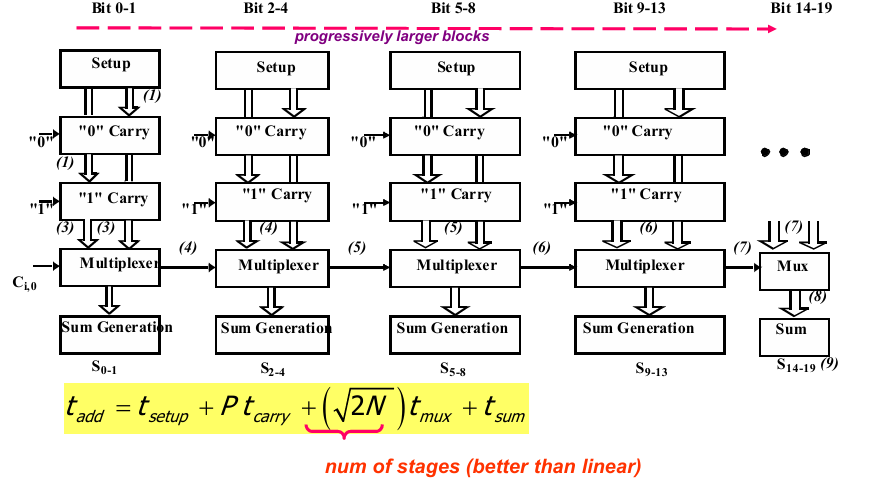
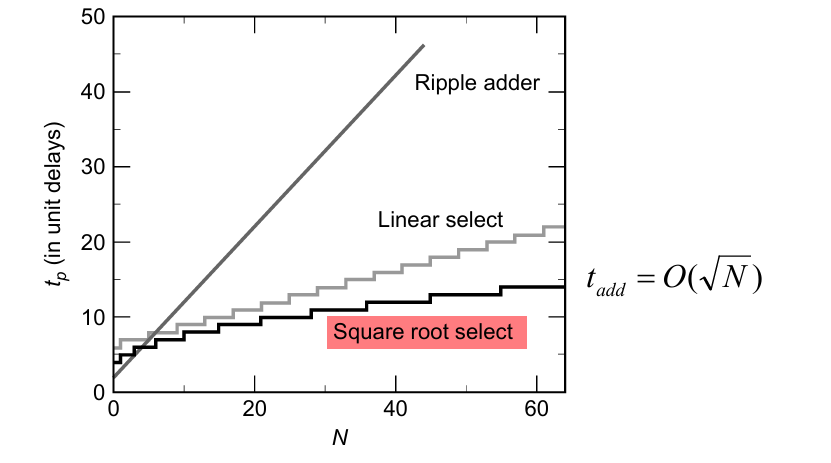
对于位数更高的加法器优化效果更好。
超前进位加法器
基础理论
加法器本质是组合逻辑,只要知道各位输入和进位输入,就可以得到进位输出。
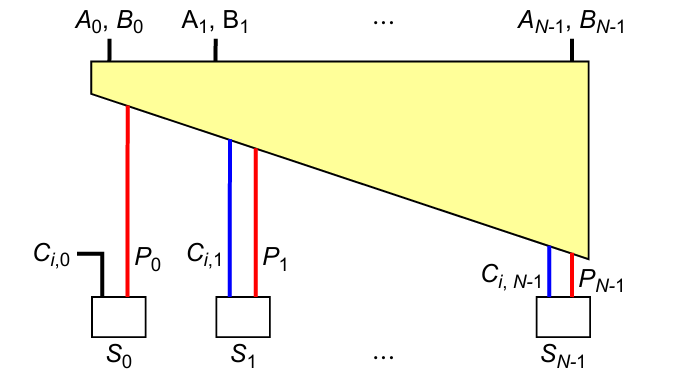
考虑第K位的进位输出:
$$C_{o,k} = f(A_k,B_k,C_{o,k-1}) = G_k+P_kC_{o,k-1}$$
即:第K位的进位产生有2种可能,一种是直接在第K位产生,另一种是低位产生的进位经由第K位传播。
注意到上面的$C_{o,k}$是一个迭代公式,可以一直迭代到最低位:
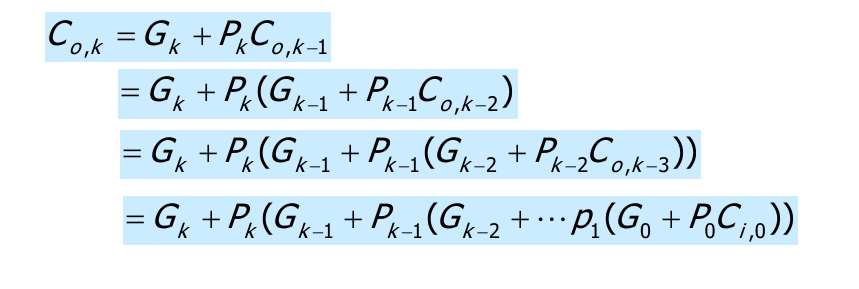
Lookahead Mirror
上面的公式可以通过下面的结构来实现:
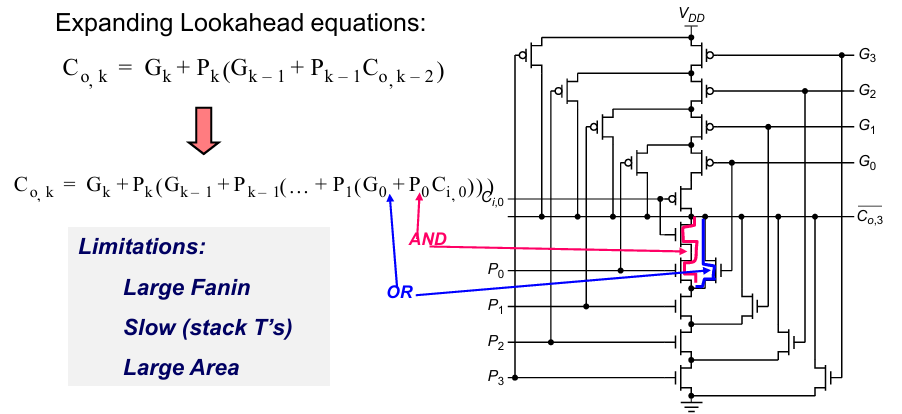
这个结构的问题在于虽然实现起来比较直观,但是扇入很大,位数一高延迟也很大。
块进位
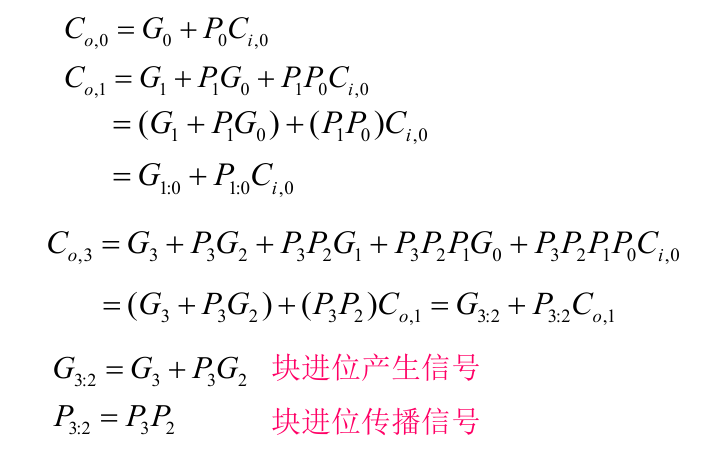
重新组合进位传播公式,我们可以发现,如果将中间的几位看作一个整体,可以从块进位和块传播的角度理解进位公式。
其中
$P_{i:j}$表示产生的进位可以经由加法器的第i到j位传播,即:
$$P_{i,j} = P_iP_{i-1}P_{i-2}\cdots P_j$$
$G_{i:j}$表示在加法器的第i到j位这个区间能够产生进位。显然有多种可能:
$$G_{i:j}=G_i+ P_iG_{i-1:j} = G_i+P_i(G_{i-1}+P_{i-1}G_{i-2:j})=G_{i,k}+G_{k-1,j}P_{i,k}$$
定义一种新的算子:
$$(G,P)\bullet(G’,P’)=(G+PG’,PP’)$$
例如要计算
$$(G_{3:2},P_{3:2})\bullet (G_{1:0},P_{1:0})\
=(G_{3:2}+P_{3:2}G_{1:0},P_{3:2}P_{1:0})\
=(G_{3:0},P_{3:0})$$
新算子$\bullet$能够将2个区间的进位产生和进位传播连接起来。其输入为4,输出为2,计算了一个乘加和一个与操作。
通过这个算子,我们可以自由组合控制进位的传播:
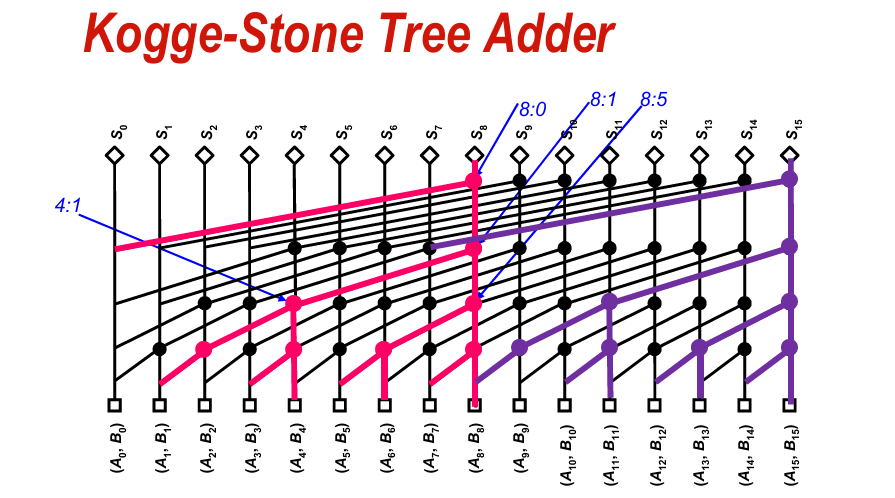
从而得到这样的树形加法器。
图中相邻2位的P和G产生过程如下:
$$(G_{1:0},P_{1:0}) = (G_{1:1},P_{1:1})\bullet (G_{0:0},P_{0:0})\
=(A_1B_1,A_1\oplus B_1)\bullet (A_0B_0,A_0\oplus B_0)$$
乘法器
二进制乘法器的原理可以表示为:
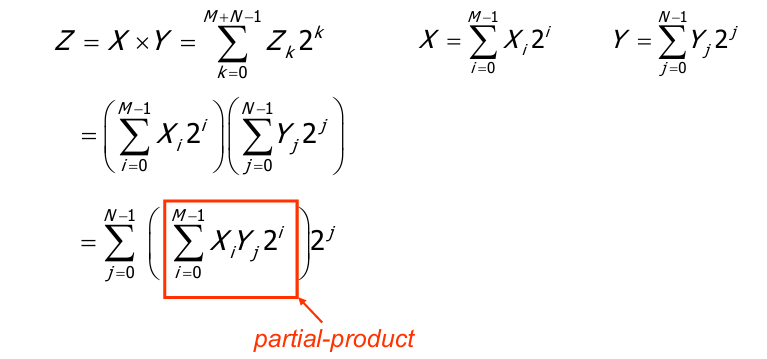
即我们熟悉的部分积之和的形式:
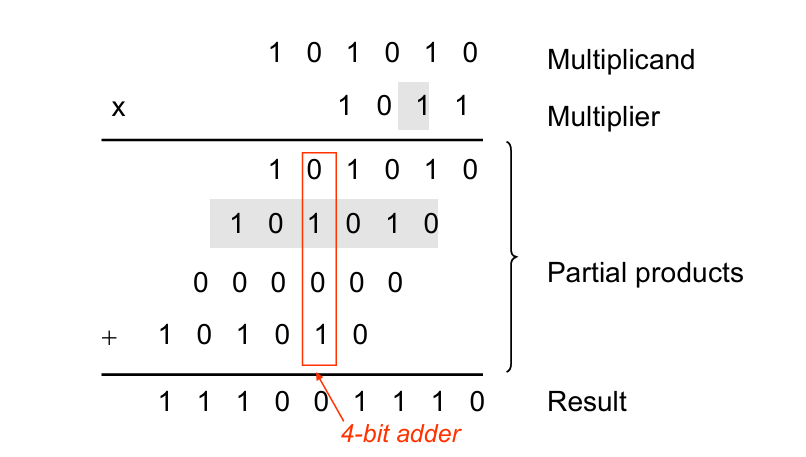
一般的乘法器可以做出下面的加法器阵列的形式。问题在于关键路径需要考虑多种进位情况。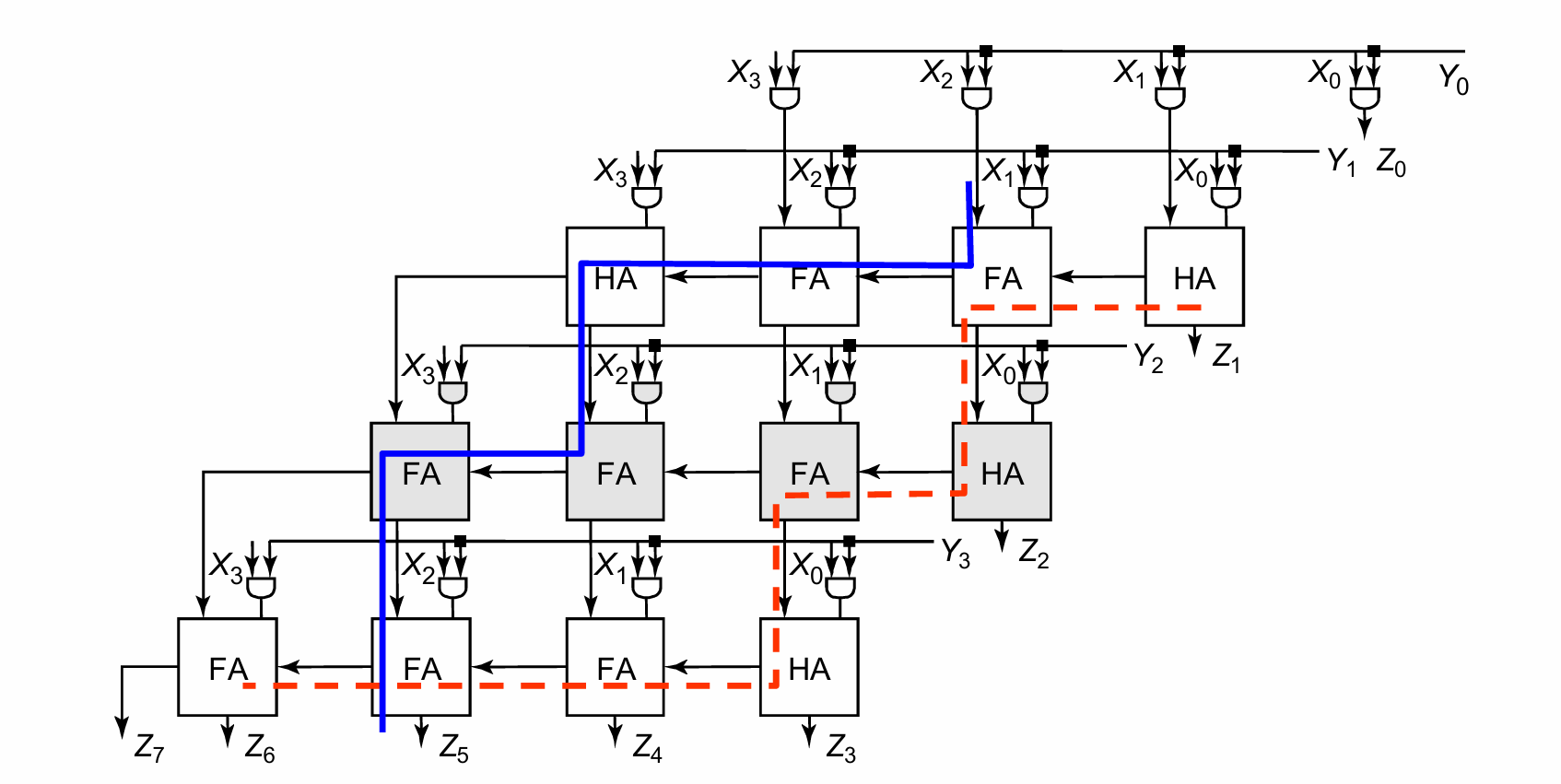
一种优化思路是进行对角线形式的进位,缩短关键路径: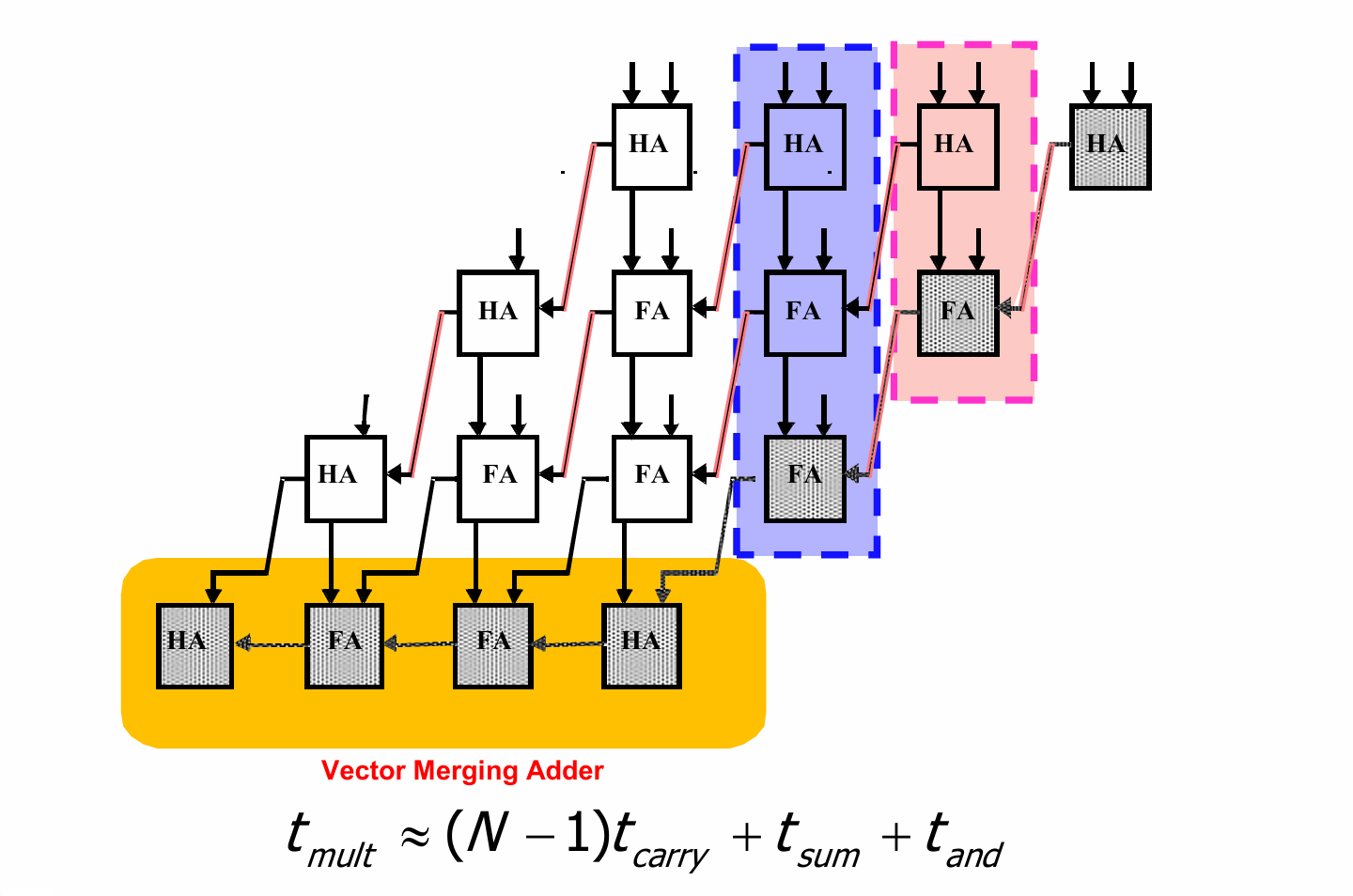
Wallace-Tree 乘法器
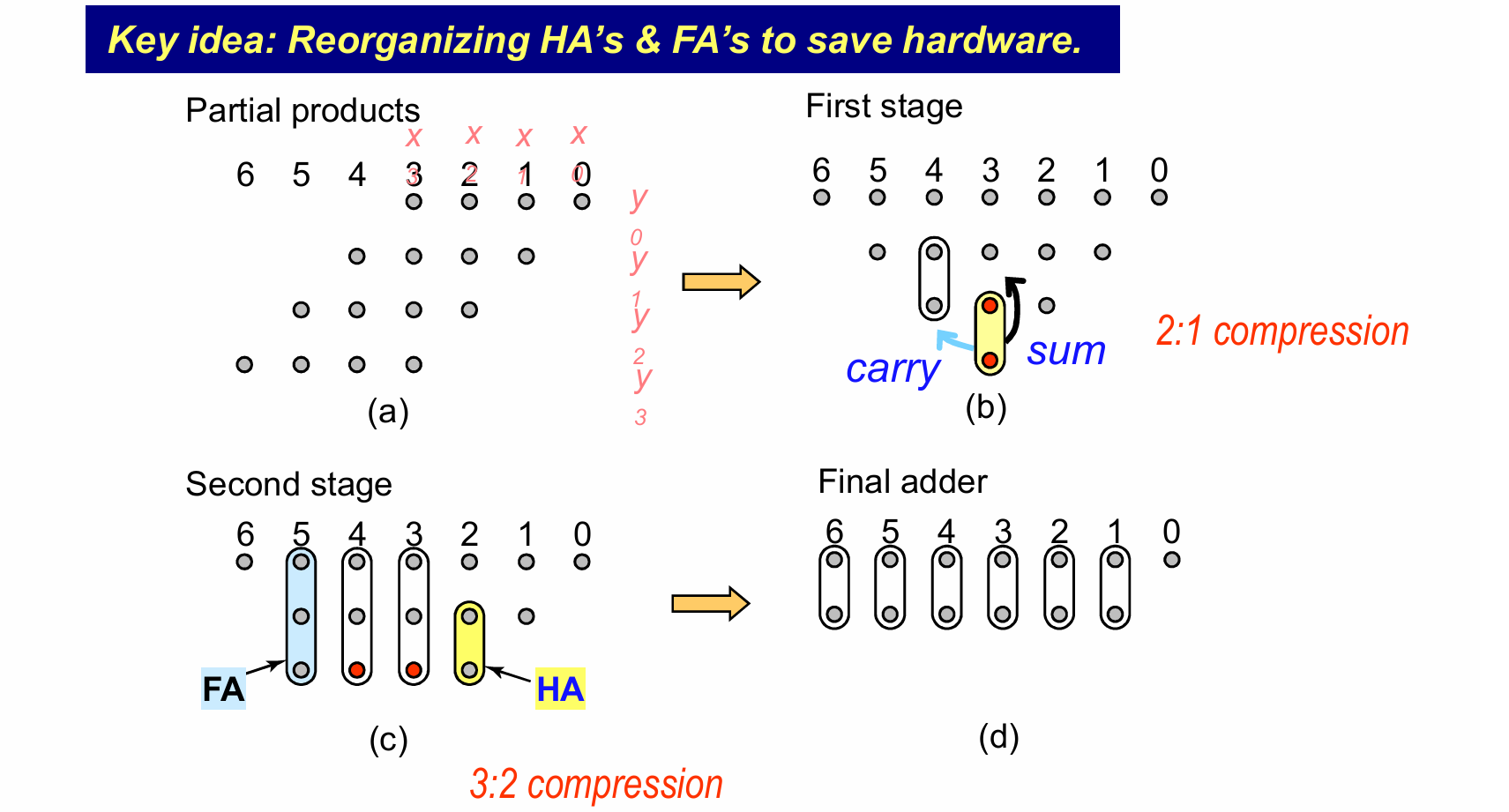
核心思路在于,半加器相当于2-2压缩器,全加器相当于3-2压缩器,通过重新排列全加器和半加器的位置,优化关键路径。
移位器